{"title":"机器人手术工具的机载视觉微伺服。","authors":"Xu Chen, Michail E Kiziroglou, Eric M Yeatman","doi":"10.1038/s41378-025-00955-x","DOIUrl":null,"url":null,"abstract":"<p><p>Precision motion actuation is a key technology for miniature medical robotics in a variety of applications, such as optical fibre-based diagnosis and intervention tools. Conventional inductive actuation mechanisms are challenging to scale down. Piezoelectric materials offer a scalable, precise, fast and high-force method but at a limited displacement range. In previous work, the combination of piezoelectric beams (benders) with compliant motion translation structures has been shown to be promising for robotic micro-actuation. In this paper, this approach is employed to implement a three degrees of freedom delta robot, suitable for catheter, diagnostic optical fibre and microsurgery tool manipulation. The fabrication process combines additive manufacturing, origami structuring and piezoelectric beam assembly. Closed-loop control is implemented using a new, on-board visual feedback concept. In contrast to typical optical motion systems, the fully internal visual feedback offers system compactness with precise and reliable camera-to-marker geometry definition. By employment of this method, a delta robot with motion accuracy of 7.5 μm, resolution of 10 μm and 8.1 μm precision is demonstrated. The robot is shown to follow a range of programmable trajectories under these specifications, and to compensate for externally applied forces typically expected during microsurgery manipulations. This is the first, to our knowledge, demonstration of micromotion control using internal visual feedback, and it opens up the way for high-resolution compact microrobots.</p>","PeriodicalId":18560,"journal":{"name":"Microsystems & Nanoengineering","volume":"11 1","pages":"112"},"PeriodicalIF":9.9000,"publicationDate":"2025-05-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12122923/pdf/","citationCount":"0","resultStr":"{\"title\":\"Onboard visual micro-servoing on robotic surgery tools.\",\"authors\":\"Xu Chen, Michail E Kiziroglou, Eric M Yeatman\",\"doi\":\"10.1038/s41378-025-00955-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Precision motion actuation is a key technology for miniature medical robotics in a variety of applications, such as optical fibre-based diagnosis and intervention tools. Conventional inductive actuation mechanisms are challenging to scale down. Piezoelectric materials offer a scalable, precise, fast and high-force method but at a limited displacement range. In previous work, the combination of piezoelectric beams (benders) with compliant motion translation structures has been shown to be promising for robotic micro-actuation. In this paper, this approach is employed to implement a three degrees of freedom delta robot, suitable for catheter, diagnostic optical fibre and microsurgery tool manipulation. The fabrication process combines additive manufacturing, origami structuring and piezoelectric beam assembly. Closed-loop control is implemented using a new, on-board visual feedback concept. In contrast to typical optical motion systems, the fully internal visual feedback offers system compactness with precise and reliable camera-to-marker geometry definition. By employment of this method, a delta robot with motion accuracy of 7.5 μm, resolution of 10 μm and 8.1 μm precision is demonstrated. The robot is shown to follow a range of programmable trajectories under these specifications, and to compensate for externally applied forces typically expected during microsurgery manipulations. This is the first, to our knowledge, demonstration of micromotion control using internal visual feedback, and it opens up the way for high-resolution compact microrobots.</p>\",\"PeriodicalId\":18560,\"journal\":{\"name\":\"Microsystems & Nanoengineering\",\"volume\":\"11 1\",\"pages\":\"112\"},\"PeriodicalIF\":9.9000,\"publicationDate\":\"2025-05-29\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12122923/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Microsystems & Nanoengineering\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1038/s41378-025-00955-x\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"INSTRUMENTS & INSTRUMENTATION\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Microsystems & Nanoengineering","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1038/s41378-025-00955-x","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"INSTRUMENTS & INSTRUMENTATION","Score":null,"Total":0}
Onboard visual micro-servoing on robotic surgery tools.
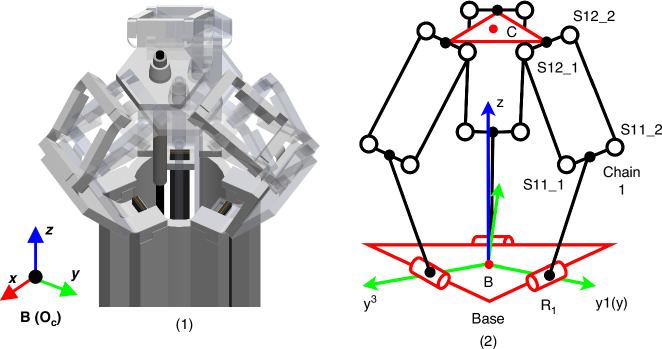
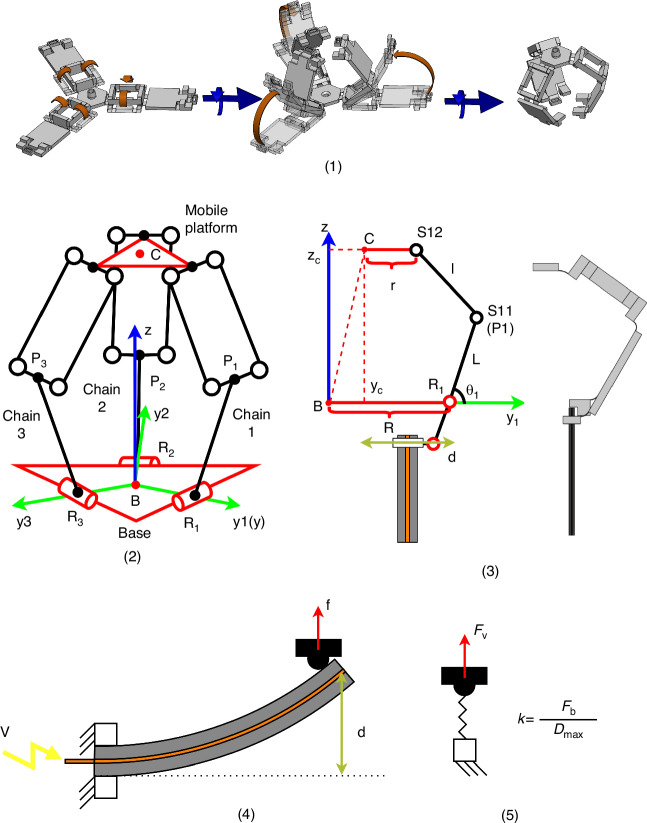
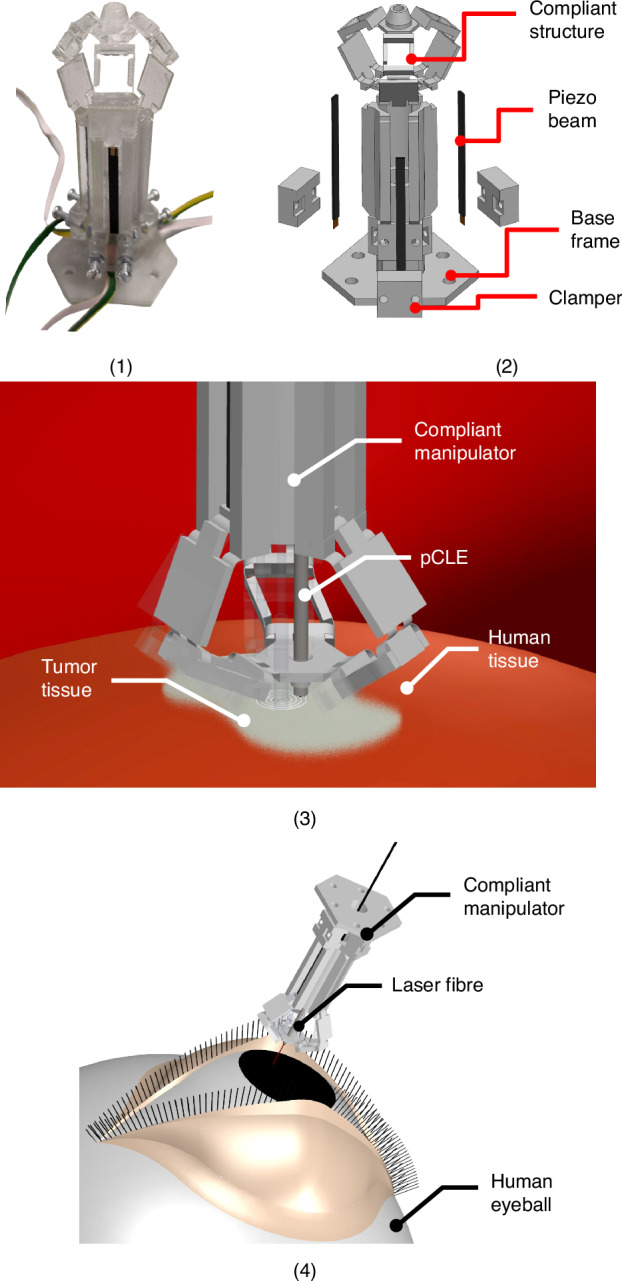
Precision motion actuation is a key technology for miniature medical robotics in a variety of applications, such as optical fibre-based diagnosis and intervention tools. Conventional inductive actuation mechanisms are challenging to scale down. Piezoelectric materials offer a scalable, precise, fast and high-force method but at a limited displacement range. In previous work, the combination of piezoelectric beams (benders) with compliant motion translation structures has been shown to be promising for robotic micro-actuation. In this paper, this approach is employed to implement a three degrees of freedom delta robot, suitable for catheter, diagnostic optical fibre and microsurgery tool manipulation. The fabrication process combines additive manufacturing, origami structuring and piezoelectric beam assembly. Closed-loop control is implemented using a new, on-board visual feedback concept. In contrast to typical optical motion systems, the fully internal visual feedback offers system compactness with precise and reliable camera-to-marker geometry definition. By employment of this method, a delta robot with motion accuracy of 7.5 μm, resolution of 10 μm and 8.1 μm precision is demonstrated. The robot is shown to follow a range of programmable trajectories under these specifications, and to compensate for externally applied forces typically expected during microsurgery manipulations. This is the first, to our knowledge, demonstration of micromotion control using internal visual feedback, and it opens up the way for high-resolution compact microrobots.
期刊介绍:
Microsystems & Nanoengineering is a comprehensive online journal that focuses on the field of Micro and Nano Electro Mechanical Systems (MEMS and NEMS). It provides a platform for researchers to share their original research findings and review articles in this area. The journal covers a wide range of topics, from fundamental research to practical applications. Published by Springer Nature, in collaboration with the Aerospace Information Research Institute, Chinese Academy of Sciences, and with the support of the State Key Laboratory of Transducer Technology, it is an esteemed publication in the field. As an open access journal, it offers free access to its content, allowing readers from around the world to benefit from the latest developments in MEMS and NEMS.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


