基于胎力预测的自动驾驶汽车实时变道轨迹规划方法
IF 3.1
3区 计算机科学
Q2 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
摘要
对于极端工况下的变道行为,现有模型无法实时计算未来足够长时间内车辆变道的胎力。为了解决这一问题,提出了一种融合个性化车辆动力学的自动驾驶车辆实时轨迹规划方案。首先建立了四轮转向和前轮转向车辆的横向动力学模型,并建立了非线性轮胎模型。然后,构建模糊逻辑机制表征车辆横向/纵向加速度与未来横向/纵向轮胎力之间的关系,实时量化轨迹规划中车辆轮胎力是否达到饱和;提出了一种安全评估模型,用于测量车辆在极端工况下发生侧滑和碰撞的风险。此外,将变道行为设计为非线性规划模型,并采用梯度下降法在线获得最优横向和纵向加速度。采用几何曲线拟合方法生成变道轨迹。MATLAB/Simulink仿真结果表明,该方法的求解时间明显低于目前广泛使用的车辆动力学方法和最新的神经网络方法,可实现变道前最大轮胎力的实时预测。此外,该方法提高了极端工况下变道纵向和横向耦合风险的计算能力,实现了针对车辆动力学特性的轨迹规划。本文章由计算机程序翻译,如有差异,请以英文原文为准。
A real-time lane change trajectory planning approach for autonomous vehicles utilizing tire force prediction
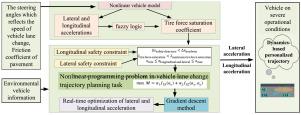
For lane change behavior under extreme operating conditions, existing models cannot calculate in real time the tire force of the vehicle lane change over a sufficiently long time frame in the future. In order to address this problem, a novel scheme is presented for real-time trajectory planning of autonomous vehicles, which incorporates personalized vehicle dynamics. We first establish lateral dynamics models for four-wheel-steering and front-wheel-steering vehicles along with a nonlinear tire model. Then, we construct a fuzzy logic mechanism to characterize the relationship between the vehicle lateral/longitudinal acceleration and the future lateral/longitudinal tire force, to quantify whether the vehicle tire force reaches saturation in trajectory planning in real time. A safety assessment model is introduced to measure the risk of side slippage of the vehicle and collision under extreme operating conditions. In addition, lane change behavior is designed as a nonlinear programming model and a gradient descent method is used to obtain optimal lateral and longitudinal accelerations online. The geometric curve fitting method is utilized to generate the lane change trajectory. The simulation results using MATLAB/Simulink demonstrate that the solution time of our method is significantly lower than that of the widely used vehicle dynamics method and the newest Neural Network method, which can realize real-time prediction of the maximum tire force before lane change. Moreover, our method improves the ability to calculate the risk of longitudinal and lateral coupling of a lane change in extreme operating conditions and then realizes trajectory planning in a vehicle-dynamics-specific way.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Mechatronics
工程技术-工程:电子与电气
CiteScore
5.90
自引率
9.10%
发文量
0
审稿时长
109 days
期刊介绍:
Mechatronics is the synergistic combination of precision mechanical engineering, electronic control and systems thinking in the design of products and manufacturing processes. It relates to the design of systems, devices and products aimed at achieving an optimal balance between basic mechanical structure and its overall control. The purpose of this journal is to provide rapid publication of topical papers featuring practical developments in mechatronics. It will cover a wide range of application areas including consumer product design, instrumentation, manufacturing methods, computer integration and process and device control, and will attract a readership from across the industrial and academic research spectrum. Particular importance will be attached to aspects of innovation in mechatronics design philosophy which illustrate the benefits obtainable by an a priori integration of functionality with embedded microprocessor control. A major item will be the design of machines, devices and systems possessing a degree of computer based intelligence. The journal seeks to publish research progress in this field with an emphasis on the applied rather than the theoretical. It will also serve the dual role of bringing greater recognition to this important area of engineering.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


