{"title":"基于软光学传感套的假手日间抓取模型概化","authors":"Linhang Ju, Hanze Jia, Yanggang Feng, Yan Huang, Yanjun Shi, Di Shi, Yixin Shao, Fuzhen Yuan, Yu Zhao, Xilun Ding, Wuxiang Zhang","doi":"10.1002/aisy.202400569","DOIUrl":null,"url":null,"abstract":"<p>Inter-day motion intent recognition using wearable sensors, due to the change in position during multiple donning and doffing, i.e., surface electromyography, remains a challenge. Herein, an optimal optical sensing sleeve using a multilayer perceptron is introduced to achieve an accurate inter-day motion intent recognition. This sleeve, demonstrating a high correlation (<i>R</i><sup>2</sup> = 0.93) with grasping force, incorporates six novel optical waveguides. Each waveguide is specifically designed to respond to pressing with high linearity, achieved by minimizing bending with a 3D-printed base and limiting elongation through carbon fiber reinforcement. This novel configuration enhances the generalization of the optical waveguides across multiple donning and doffing sessions. Furthermore, the multilayer perceptron model, which maps sensing signals to grasping forces, shows optimal performance compared to linear, quadratic, cubic, and quartic polynomial models. Remarkably, the correlation in mapping does not decrease in inter-day experiments; instead, it increases by 4.54%, indicating improved model generalization. Additionally, 12 commonly used items are grasped and held by a prosthetic hand, controlled by the optical sensing sleeve, which suggests the robustness in daily life, for an amputee. The optimal optical sensing sleeve holds promise for contributing to advancements in other wearable robots and achieving an inter-day model generalization.</p>","PeriodicalId":93858,"journal":{"name":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","volume":"7 5","pages":""},"PeriodicalIF":6.1000,"publicationDate":"2025-03-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202400569","citationCount":"0","resultStr":"{\"title\":\"Inter-Day Grasping Model Generalization for Prosthetic Hand Using Soft Optical Sensing Sleeve\",\"authors\":\"Linhang Ju, Hanze Jia, Yanggang Feng, Yan Huang, Yanjun Shi, Di Shi, Yixin Shao, Fuzhen Yuan, Yu Zhao, Xilun Ding, Wuxiang Zhang\",\"doi\":\"10.1002/aisy.202400569\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Inter-day motion intent recognition using wearable sensors, due to the change in position during multiple donning and doffing, i.e., surface electromyography, remains a challenge. Herein, an optimal optical sensing sleeve using a multilayer perceptron is introduced to achieve an accurate inter-day motion intent recognition. This sleeve, demonstrating a high correlation (<i>R</i><sup>2</sup> = 0.93) with grasping force, incorporates six novel optical waveguides. Each waveguide is specifically designed to respond to pressing with high linearity, achieved by minimizing bending with a 3D-printed base and limiting elongation through carbon fiber reinforcement. This novel configuration enhances the generalization of the optical waveguides across multiple donning and doffing sessions. Furthermore, the multilayer perceptron model, which maps sensing signals to grasping forces, shows optimal performance compared to linear, quadratic, cubic, and quartic polynomial models. Remarkably, the correlation in mapping does not decrease in inter-day experiments; instead, it increases by 4.54%, indicating improved model generalization. Additionally, 12 commonly used items are grasped and held by a prosthetic hand, controlled by the optical sensing sleeve, which suggests the robustness in daily life, for an amputee. The optimal optical sensing sleeve holds promise for contributing to advancements in other wearable robots and achieving an inter-day model generalization.</p>\",\"PeriodicalId\":93858,\"journal\":{\"name\":\"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)\",\"volume\":\"7 5\",\"pages\":\"\"},\"PeriodicalIF\":6.1000,\"publicationDate\":\"2025-03-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202400569\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://advanced.onlinelibrary.wiley.com/doi/10.1002/aisy.202400569\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","FirstCategoryId":"1085","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/aisy.202400569","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Inter-Day Grasping Model Generalization for Prosthetic Hand Using Soft Optical Sensing Sleeve
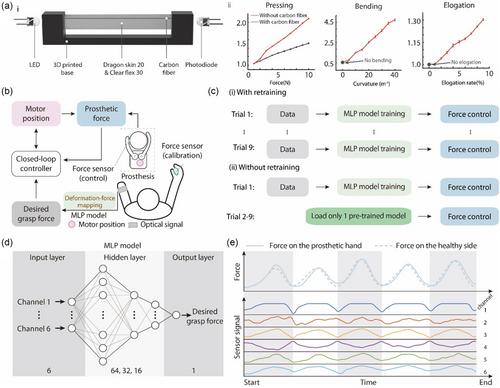
Inter-day motion intent recognition using wearable sensors, due to the change in position during multiple donning and doffing, i.e., surface electromyography, remains a challenge. Herein, an optimal optical sensing sleeve using a multilayer perceptron is introduced to achieve an accurate inter-day motion intent recognition. This sleeve, demonstrating a high correlation (R2 = 0.93) with grasping force, incorporates six novel optical waveguides. Each waveguide is specifically designed to respond to pressing with high linearity, achieved by minimizing bending with a 3D-printed base and limiting elongation through carbon fiber reinforcement. This novel configuration enhances the generalization of the optical waveguides across multiple donning and doffing sessions. Furthermore, the multilayer perceptron model, which maps sensing signals to grasping forces, shows optimal performance compared to linear, quadratic, cubic, and quartic polynomial models. Remarkably, the correlation in mapping does not decrease in inter-day experiments; instead, it increases by 4.54%, indicating improved model generalization. Additionally, 12 commonly used items are grasped and held by a prosthetic hand, controlled by the optical sensing sleeve, which suggests the robustness in daily life, for an amputee. The optimal optical sensing sleeve holds promise for contributing to advancements in other wearable robots and achieving an inter-day model generalization.





 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


