配电站巡检机器人采用模块化机械手
IF 2.1
Q3 ENGINEERING, ELECTRICAL & ELECTRONIC
引用次数: 0
摘要
变电站巡检机器人在保障电网系统安全、提高运行效率方面发挥着至关重要的作用。然而,现有的检测机器人经常面临机械末端执行器灵活性有限、刀具切换速度慢以及无法满足多种操作需求等挑战,这限制了它们的效率和适应性。为了克服这些限制,本文介绍了一种配备模块化机械臂的变电站巡检机器人。该机器人采用同轴对齐末端执行器设计,通过单自由度驱动实现三种操作模式的快速刀具切换。这种设计允许控制设备的精确操作,包括按钮,旋转开关和抽出断路器,大大提高了操作的灵活性和效率。此外,该机器人坚持低成本,开源可及性和模块化的原则,使其特别适合室内变电站检查任务和操作验证。此外,它还为算法开发和相关研究提供了一个通用的硬件平台。实验结果证实了该机器人在多种场景下的运行性能,为实现变电站完全无人操作提供了坚实的技术支持。本文章由计算机程序翻译,如有差异,请以英文原文为准。
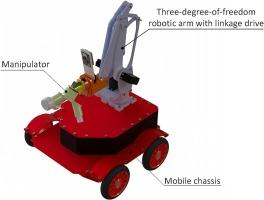
Distribution station inspection robot with modular manipulator
Substation inspection robots play a vital role in ensuring the safety of power grid systems and improving operational efficiency. However, existing inspection robots often face challenges such as limited flexibility at the mechanical end-effector, slow tool-switching speeds, and an inability to meet diverse operational demands, which restrict their efficiency and adaptability. To overcome these limitations, this paper introduces a substation inspection robot equipped with a modular robotic arm. The robot incorporates a coaxially aligned end-effector design, enabling rapid tool switching across three operational modes via a single-degree-of-freedom drive. This design allows for precise operation of control devices, including push buttons, rotary switches, and draw-out circuit breakers, significantly enhancing both operational flexibility and efficiency. Moreover, the robot adheres to the principles of low cost, open-source accessibility, and modularity, making it particularly suitable for indoor substation inspection tasks and operational validations. Additionally, it provides a versatile hardware platform for the development of algorithms and related research. Experimental results confirm the robot’s operational performance across a variety of scenarios, offering solid technological support for the realization of fully unmanned substation operations.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

HardwareX
Engineering-Industrial and Manufacturing Engineering
CiteScore
4.10
自引率
18.20%
发文量
124
审稿时长
24 weeks
期刊介绍:
HardwareX is an open access journal established to promote free and open source designing, building and customizing of scientific infrastructure (hardware). HardwareX aims to recognize researchers for the time and effort in developing scientific infrastructure while providing end-users with sufficient information to replicate and validate the advances presented. HardwareX is open to input from all scientific, technological and medical disciplines. Scientific infrastructure will be interpreted in the broadest sense. Including hardware modifications to existing infrastructure, sensors and tools that perform measurements and other functions outside of the traditional lab setting (such as wearables, air/water quality sensors, and low cost alternatives to existing tools), and the creation of wholly new tools for either standard or novel laboratory tasks. Authors are encouraged to submit hardware developments that address all aspects of science, not only the final measurement, for example, enhancements in sample preparation and handling, user safety, and quality control. The use of distributed digital manufacturing strategies (e.g. 3-D printing) is encouraged. All designs must be submitted under an open hardware license.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


