{"title":"基于BART的低空空域无线电话通信标准化方法研究。","authors":"Weijun Pan, Boyuan Han, Peiyuan Jiang","doi":"10.3389/fnbot.2025.1482327","DOIUrl":null,"url":null,"abstract":"<p><p>The development of air traffic control (ATC) automation has been constrained by the scarcity and low quality of communication data, particularly in low-altitude complex airspace, where non-standardized instructions frequently hinder training efficiency and operational safety. This paper proposes the BART-Reinforcement Learning (BRL) model, a deep reinforcement learning model based on the BART pre-trained language model, optimized through transfer learning and reinforcement learning techniques. The model was evaluated on multiple ATC datasets, including training flight data, civil aviation operational data, and standardized datasets generated from Radiotelephony Communications for Air Traffic Services. Evaluation metrics included ROUGE and semantic intent-based indicators, with comparative analysis against several baseline models. Experimental results demonstrate that BRL achieves a 10.5% improvement in overall accuracy on the training dataset with the highest degree of non-standardization, significantly outperforming the baseline models. Furthermore, comprehensive evaluations validate the model's effectiveness in standardizing various types of instructions. The findings suggest that reinforcement learning-based approaches have the potential to significantly enhance ATC automation, reducing communication inconsistencies, and improving training efficiency and operational safety. Future research may further optimize standardization by incorporating additional contextual factors into the model.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1482327"},"PeriodicalIF":2.8000,"publicationDate":"2025-04-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12000013/pdf/","citationCount":"0","resultStr":"{\"title\":\"Study on the standardization method of radiotelephony communication in low-altitude airspace based on BART.\",\"authors\":\"Weijun Pan, Boyuan Han, Peiyuan Jiang\",\"doi\":\"10.3389/fnbot.2025.1482327\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>The development of air traffic control (ATC) automation has been constrained by the scarcity and low quality of communication data, particularly in low-altitude complex airspace, where non-standardized instructions frequently hinder training efficiency and operational safety. This paper proposes the BART-Reinforcement Learning (BRL) model, a deep reinforcement learning model based on the BART pre-trained language model, optimized through transfer learning and reinforcement learning techniques. The model was evaluated on multiple ATC datasets, including training flight data, civil aviation operational data, and standardized datasets generated from Radiotelephony Communications for Air Traffic Services. Evaluation metrics included ROUGE and semantic intent-based indicators, with comparative analysis against several baseline models. Experimental results demonstrate that BRL achieves a 10.5% improvement in overall accuracy on the training dataset with the highest degree of non-standardization, significantly outperforming the baseline models. Furthermore, comprehensive evaluations validate the model's effectiveness in standardizing various types of instructions. The findings suggest that reinforcement learning-based approaches have the potential to significantly enhance ATC automation, reducing communication inconsistencies, and improving training efficiency and operational safety. Future research may further optimize standardization by incorporating additional contextual factors into the model.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"19 \",\"pages\":\"1482327\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2025-04-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12000013/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2025.1482327\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1482327","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Study on the standardization method of radiotelephony communication in low-altitude airspace based on BART.
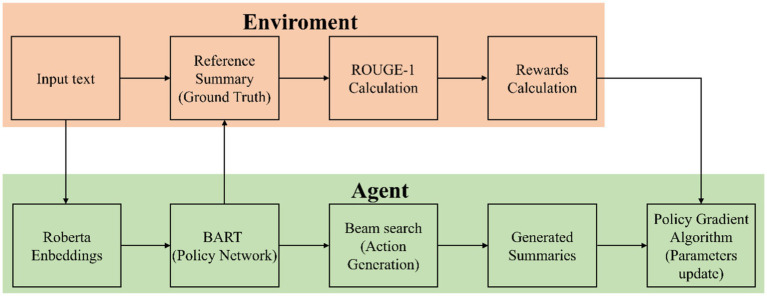
The development of air traffic control (ATC) automation has been constrained by the scarcity and low quality of communication data, particularly in low-altitude complex airspace, where non-standardized instructions frequently hinder training efficiency and operational safety. This paper proposes the BART-Reinforcement Learning (BRL) model, a deep reinforcement learning model based on the BART pre-trained language model, optimized through transfer learning and reinforcement learning techniques. The model was evaluated on multiple ATC datasets, including training flight data, civil aviation operational data, and standardized datasets generated from Radiotelephony Communications for Air Traffic Services. Evaluation metrics included ROUGE and semantic intent-based indicators, with comparative analysis against several baseline models. Experimental results demonstrate that BRL achieves a 10.5% improvement in overall accuracy on the training dataset with the highest degree of non-standardization, significantly outperforming the baseline models. Furthermore, comprehensive evaluations validate the model's effectiveness in standardizing various types of instructions. The findings suggest that reinforcement learning-based approaches have the potential to significantly enhance ATC automation, reducing communication inconsistencies, and improving training efficiency and operational safety. Future research may further optimize standardization by incorporating additional contextual factors into the model.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


