Mohammed Alshehri, Laiba Zahoor, Yahya AlQahtani, Abdulmonem Alshahrani, Dina Abdulaziz AlHammadi, Ahmad Jalal, Hui Liu
{"title":"基于深度神经网络模型的无人机多人检测。","authors":"Mohammed Alshehri, Laiba Zahoor, Yahya AlQahtani, Abdulmonem Alshahrani, Dina Abdulaziz AlHammadi, Ahmad Jalal, Hui Liu","doi":"10.3389/fnbot.2025.1582995","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Understanding human actions in complex environments is crucial for advancing applications in areas such as surveillance, robotics, and autonomous systems. Identifying actions from UAV-recorded videos becomes more challenging as the task presents unique challenges, including motion blur, dynamic background, lighting variations, and varying viewpoints. The presented work develops a deep learning system that recognizes multi-person behaviors from data gathered by UAVs. The proposed system provides higher recognition accuracy while maintaining robustness along with dynamic environmental adaptability through the integration of different features and neural network models. The study supports the wider development of neural network systems utilized in complicated contexts while creating intelligent UAV applications utilizing neural networks.</p><p><strong>Method: </strong>The proposed study uses deep learning and feature extraction approaches to create a novel method to recognize various actions in UAV-recorded video. The proposed model improves identification capacities and system robustness by addressing motion dynamic problems and intricate environmental constraints, encouraging advancements in UAV-based neural network systems.</p><p><strong>Results: </strong>We proposed a deep learning-based framework with feature extraction approaches that may effectively increase the accuracy and robustness of multi-person action recognition in the challenging scenarios. Compared to the existing approaches, our system achieved 91.50% on MOD20 dataset and 89.71% on Okutama-Action. These results do, in fact, show how useful neural network-based methods are for managing the limitations of UAV-based application.</p><p><strong>Discussion: </strong>Results how that the proposed framework is indeed effective at multi-person action recognition under difficult UAV conditions.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1582995"},"PeriodicalIF":2.8000,"publicationDate":"2025-04-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12043872/pdf/","citationCount":"0","resultStr":"{\"title\":\"Unmanned aerial vehicle based multi-person detection via deep neural network models.\",\"authors\":\"Mohammed Alshehri, Laiba Zahoor, Yahya AlQahtani, Abdulmonem Alshahrani, Dina Abdulaziz AlHammadi, Ahmad Jalal, Hui Liu\",\"doi\":\"10.3389/fnbot.2025.1582995\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>Understanding human actions in complex environments is crucial for advancing applications in areas such as surveillance, robotics, and autonomous systems. Identifying actions from UAV-recorded videos becomes more challenging as the task presents unique challenges, including motion blur, dynamic background, lighting variations, and varying viewpoints. The presented work develops a deep learning system that recognizes multi-person behaviors from data gathered by UAVs. The proposed system provides higher recognition accuracy while maintaining robustness along with dynamic environmental adaptability through the integration of different features and neural network models. The study supports the wider development of neural network systems utilized in complicated contexts while creating intelligent UAV applications utilizing neural networks.</p><p><strong>Method: </strong>The proposed study uses deep learning and feature extraction approaches to create a novel method to recognize various actions in UAV-recorded video. The proposed model improves identification capacities and system robustness by addressing motion dynamic problems and intricate environmental constraints, encouraging advancements in UAV-based neural network systems.</p><p><strong>Results: </strong>We proposed a deep learning-based framework with feature extraction approaches that may effectively increase the accuracy and robustness of multi-person action recognition in the challenging scenarios. Compared to the existing approaches, our system achieved 91.50% on MOD20 dataset and 89.71% on Okutama-Action. These results do, in fact, show how useful neural network-based methods are for managing the limitations of UAV-based application.</p><p><strong>Discussion: </strong>Results how that the proposed framework is indeed effective at multi-person action recognition under difficult UAV conditions.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"19 \",\"pages\":\"1582995\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2025-04-17\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12043872/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2025.1582995\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1582995","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Unmanned aerial vehicle based multi-person detection via deep neural network models.
Introduction: Understanding human actions in complex environments is crucial for advancing applications in areas such as surveillance, robotics, and autonomous systems. Identifying actions from UAV-recorded videos becomes more challenging as the task presents unique challenges, including motion blur, dynamic background, lighting variations, and varying viewpoints. The presented work develops a deep learning system that recognizes multi-person behaviors from data gathered by UAVs. The proposed system provides higher recognition accuracy while maintaining robustness along with dynamic environmental adaptability through the integration of different features and neural network models. The study supports the wider development of neural network systems utilized in complicated contexts while creating intelligent UAV applications utilizing neural networks.
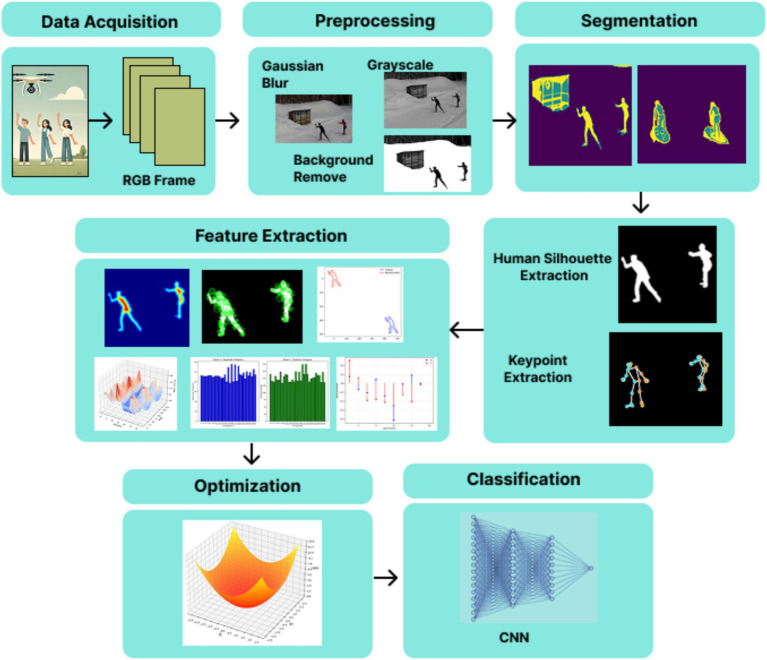
Method: The proposed study uses deep learning and feature extraction approaches to create a novel method to recognize various actions in UAV-recorded video. The proposed model improves identification capacities and system robustness by addressing motion dynamic problems and intricate environmental constraints, encouraging advancements in UAV-based neural network systems.
Results: We proposed a deep learning-based framework with feature extraction approaches that may effectively increase the accuracy and robustness of multi-person action recognition in the challenging scenarios. Compared to the existing approaches, our system achieved 91.50% on MOD20 dataset and 89.71% on Okutama-Action. These results do, in fact, show how useful neural network-based methods are for managing the limitations of UAV-based application.
Discussion: Results how that the proposed framework is indeed effective at multi-person action recognition under difficult UAV conditions.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


