{"title":"ModuCLIP:多模态机器人系统中预测基坑变形的多尺度CLIP框架。","authors":"Lin Wenbo, Li Tingting, Li Xiao","doi":"10.3389/fnbot.2025.1544694","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Foundation pit deformation prediction is a critical aspect of underground engineering safety assessment, influencing construction quality and personnel safety. However, due to complex geological conditions and numerous environmental interference factors, traditional prediction methods struggle to achieve precise modeling. Conventional approaches, including numerical simulations, empirical formulas, and machine learning models, suffer from limitations such as high computational costs, poor generalization, or excessive dependence on specific data distributions. Recently, deep learning models, particularly cross-modal architectures, have demonstrated great potential in engineering applications. However, effectively integrating multi-modal data for improved prediction accuracy remains a significant challenge.</p><p><strong>Methods: </strong>This study proposes a Multi-Scale Contrastive Language-Image Pretraining (CLP) framework, ModuCLIP, designed for foundation pit deformation prediction in multi-modal robotic systems. The framework leverages a self-supervised contrastive learning mechanism to integrate multi-source information, including images, textual descriptions, and sensor data, while employing a multi-scale feature learning approach to enhance adaptability to complex conditions. Experiments conducted on multiple foundation pit engineering datasets demonstrate that ModuCLIP outperforms existing methods in terms of prediction accuracy, generalization, and robustness.</p><p><strong>Results and discussion: </strong>The findings suggest that this framework provides an efficient and precise solution for foundation pit deformation prediction while offering new insights into multi-modal robotic perception and engineering monitoring applications.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1544694"},"PeriodicalIF":2.8000,"publicationDate":"2025-04-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11996866/pdf/","citationCount":"0","resultStr":"{\"title\":\"ModuCLIP: multi-scale CLIP framework for predicting foundation pit deformation in multi-modal robotic systems.\",\"authors\":\"Lin Wenbo, Li Tingting, Li Xiao\",\"doi\":\"10.3389/fnbot.2025.1544694\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>Foundation pit deformation prediction is a critical aspect of underground engineering safety assessment, influencing construction quality and personnel safety. However, due to complex geological conditions and numerous environmental interference factors, traditional prediction methods struggle to achieve precise modeling. Conventional approaches, including numerical simulations, empirical formulas, and machine learning models, suffer from limitations such as high computational costs, poor generalization, or excessive dependence on specific data distributions. Recently, deep learning models, particularly cross-modal architectures, have demonstrated great potential in engineering applications. However, effectively integrating multi-modal data for improved prediction accuracy remains a significant challenge.</p><p><strong>Methods: </strong>This study proposes a Multi-Scale Contrastive Language-Image Pretraining (CLP) framework, ModuCLIP, designed for foundation pit deformation prediction in multi-modal robotic systems. The framework leverages a self-supervised contrastive learning mechanism to integrate multi-source information, including images, textual descriptions, and sensor data, while employing a multi-scale feature learning approach to enhance adaptability to complex conditions. Experiments conducted on multiple foundation pit engineering datasets demonstrate that ModuCLIP outperforms existing methods in terms of prediction accuracy, generalization, and robustness.</p><p><strong>Results and discussion: </strong>The findings suggest that this framework provides an efficient and precise solution for foundation pit deformation prediction while offering new insights into multi-modal robotic perception and engineering monitoring applications.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"19 \",\"pages\":\"1544694\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2025-04-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11996866/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2025.1544694\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1544694","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
ModuCLIP: multi-scale CLIP framework for predicting foundation pit deformation in multi-modal robotic systems.
Introduction: Foundation pit deformation prediction is a critical aspect of underground engineering safety assessment, influencing construction quality and personnel safety. However, due to complex geological conditions and numerous environmental interference factors, traditional prediction methods struggle to achieve precise modeling. Conventional approaches, including numerical simulations, empirical formulas, and machine learning models, suffer from limitations such as high computational costs, poor generalization, or excessive dependence on specific data distributions. Recently, deep learning models, particularly cross-modal architectures, have demonstrated great potential in engineering applications. However, effectively integrating multi-modal data for improved prediction accuracy remains a significant challenge.
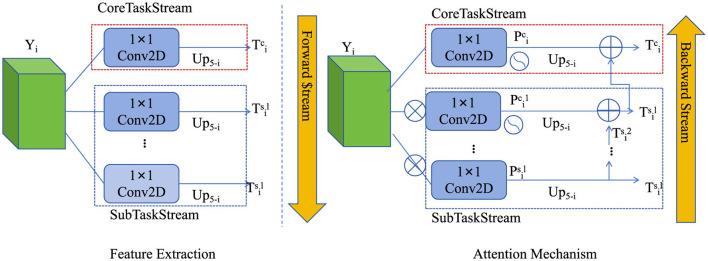
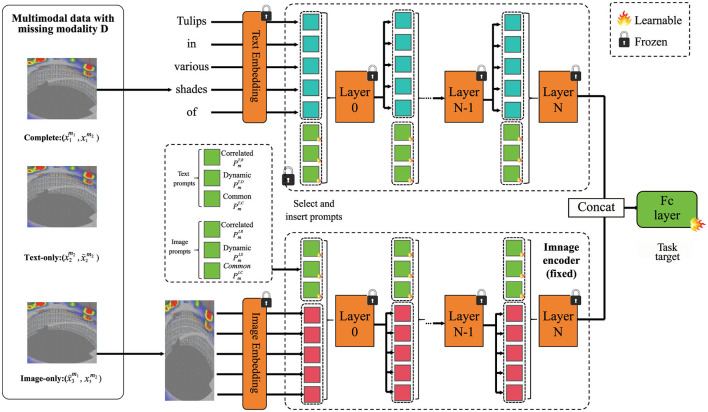
Methods: This study proposes a Multi-Scale Contrastive Language-Image Pretraining (CLP) framework, ModuCLIP, designed for foundation pit deformation prediction in multi-modal robotic systems. The framework leverages a self-supervised contrastive learning mechanism to integrate multi-source information, including images, textual descriptions, and sensor data, while employing a multi-scale feature learning approach to enhance adaptability to complex conditions. Experiments conducted on multiple foundation pit engineering datasets demonstrate that ModuCLIP outperforms existing methods in terms of prediction accuracy, generalization, and robustness.
Results and discussion: The findings suggest that this framework provides an efficient and precise solution for foundation pit deformation prediction while offering new insights into multi-modal robotic perception and engineering monitoring applications.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


