{"title":"用于远程操纵水中大型物体的声学超材料。","authors":"Dajun Zhang and Chu Ma","doi":"10.1039/D5MH00048C","DOIUrl":null,"url":null,"abstract":"<p >Acoustic metamaterials have recently been applied to assist in the remote manipulation of objects in air, showing remarkable potential to alleviate the constraints of non-metamaterial-based acoustic manipulation methods in terms of object size and the force degree of freedom. To extend this approach to underwater manipulation, in this work, we develop a new type of underwater acoustic metamaterial based on a metal–resin composite, offering submillimeter scale feature resolution and high acoustic impedance contrast with water. By designing the surface patterns of the metamaterial, we demonstrate the remote acoustic manipulation of in-water large objects (>20 wavelengths) with 3D translational and rotational degrees of freedom. We then proposed two methods, surface pattern superimposition and frequency multiplexing, to integrate different manipulation forces within a single metamaterial patch. Additionally, we demonstrate more examples of complex object manipulation using multiple metamaterial patches and transducers, such as multi-object, multi-path, non-invasive, and 3D underwater manipulation. Our metamaterial-assisted remote underwater acoustic manipulation will have broad applications in underwater robot actuation, vehicle transportation, manufacturing, drug delivery and minimally invasive surgery.</p>","PeriodicalId":87,"journal":{"name":"Materials Horizons","volume":" 13","pages":" 4639-4647"},"PeriodicalIF":10.7000,"publicationDate":"2025-04-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Acoustic metamaterials for remote manipulation of large objects in water†\",\"authors\":\"Dajun Zhang and Chu Ma\",\"doi\":\"10.1039/D5MH00048C\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p >Acoustic metamaterials have recently been applied to assist in the remote manipulation of objects in air, showing remarkable potential to alleviate the constraints of non-metamaterial-based acoustic manipulation methods in terms of object size and the force degree of freedom. To extend this approach to underwater manipulation, in this work, we develop a new type of underwater acoustic metamaterial based on a metal–resin composite, offering submillimeter scale feature resolution and high acoustic impedance contrast with water. By designing the surface patterns of the metamaterial, we demonstrate the remote acoustic manipulation of in-water large objects (>20 wavelengths) with 3D translational and rotational degrees of freedom. We then proposed two methods, surface pattern superimposition and frequency multiplexing, to integrate different manipulation forces within a single metamaterial patch. Additionally, we demonstrate more examples of complex object manipulation using multiple metamaterial patches and transducers, such as multi-object, multi-path, non-invasive, and 3D underwater manipulation. Our metamaterial-assisted remote underwater acoustic manipulation will have broad applications in underwater robot actuation, vehicle transportation, manufacturing, drug delivery and minimally invasive surgery.</p>\",\"PeriodicalId\":87,\"journal\":{\"name\":\"Materials Horizons\",\"volume\":\" 13\",\"pages\":\" 4639-4647\"},\"PeriodicalIF\":10.7000,\"publicationDate\":\"2025-04-23\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Materials Horizons\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://pubs.rsc.org/en/content/articlelanding/2025/mh/d5mh00048c\",\"RegionNum\":2,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Materials Horizons","FirstCategoryId":"88","ListUrlMain":"https://pubs.rsc.org/en/content/articlelanding/2025/mh/d5mh00048c","RegionNum":2,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
Acoustic metamaterials for remote manipulation of large objects in water†
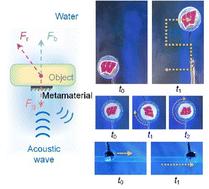
Acoustic metamaterials have recently been applied to assist in the remote manipulation of objects in air, showing remarkable potential to alleviate the constraints of non-metamaterial-based acoustic manipulation methods in terms of object size and the force degree of freedom. To extend this approach to underwater manipulation, in this work, we develop a new type of underwater acoustic metamaterial based on a metal–resin composite, offering submillimeter scale feature resolution and high acoustic impedance contrast with water. By designing the surface patterns of the metamaterial, we demonstrate the remote acoustic manipulation of in-water large objects (>20 wavelengths) with 3D translational and rotational degrees of freedom. We then proposed two methods, surface pattern superimposition and frequency multiplexing, to integrate different manipulation forces within a single metamaterial patch. Additionally, we demonstrate more examples of complex object manipulation using multiple metamaterial patches and transducers, such as multi-object, multi-path, non-invasive, and 3D underwater manipulation. Our metamaterial-assisted remote underwater acoustic manipulation will have broad applications in underwater robot actuation, vehicle transportation, manufacturing, drug delivery and minimally invasive surgery.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


