一种基于接触电性差异的软触觉传感器,用于刚度识别和材料识别
IF 17.1
1区 材料科学
Q1 CHEMISTRY, PHYSICAL
引用次数: 0
摘要
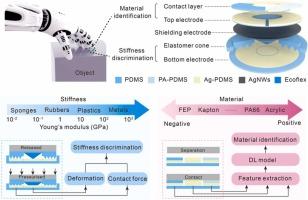
触觉感知已成为使机器人在非结构化环境中操作的必要条件。目前的触觉传感器在实现多模态感知方面面临着统一的感知原理和紧凑的结构的根本限制。这项工作提出了一种软触觉传感器(STS),能够同时测量接触力,区分刚度和识别材料。多模态触觉感知是基于STS的结构和材料设计,通过接触电气化差异来实现的。通过不同弹性模量结构产生的接触电性差异,STS可以有效分离接触力和变形信号,在0.06 ~ 2 MPa范围内进行精确的刚度判别。此外,通过利用三种不同聚合物复合材料的接触电气化特性,结合深度学习算法,该传感器可以对12种材料类型进行分类,准确率高达96.4%。由于STS结构紧凑、柔软,可以很容易地集成到机器人抓取器中,同时进行刚度识别和材料识别,不仅可以让机器人调整抓取力,还可以指导机器人与不同物体交互的操作策略。本文章由计算机程序翻译,如有差异,请以英文原文为准。
A soft tactile sensor based on contact-electrification difference for simultaneous stiffness discrimination and material identification
Tactile perception has become essential to enable robotic manipulation in unstructured environments. Current tactile sensors face fundamental limitations in achieving multimodal perception by a unified sensing principle and compact structure. This work proposes a soft tactile sensor (STS) capable of simultaneously measuring contact force, discriminating stiffness, and identifying materials. The multimodal tactile perception is achieved by contact-electrification difference, which is based on the structure and material design of the STS. Through the contact-electrification difference caused by the structure with different elastic modulus, the STS can effectively separate the contact force and deformation signals for precise stiffness discrimination across 0.06–2 MPa. In addition, by leveraging the contact-electrification properties of three distinct polymer composites, combined with deep learning algorithms, the sensor can classify 12 material types with a high accuracy of 96.4 %. Owing to the compact and soft structure, the STS can be readily integrated into robotic grippers for simultaneous stiffness discrimination and material identification, which not only allows the robots to adjust their grasping force, but guides the operational strategies for interacting with different objects.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
Nano Energy
CHEMISTRY, PHYSICAL-NANOSCIENCE & NANOTECHNOLOGY
CiteScore
30.30
自引率
7.40%
发文量
1207
审稿时长
23 days
期刊介绍:
Nano Energy is a multidisciplinary, rapid-publication forum of original peer-reviewed contributions on the science and engineering of nanomaterials and nanodevices used in all forms of energy harvesting, conversion, storage, utilization and policy. Through its mixture of articles, reviews, communications, research news, and information on key developments, Nano Energy provides a comprehensive coverage of this exciting and dynamic field which joins nanoscience and nanotechnology with energy science. The journal is relevant to all those who are interested in nanomaterials solutions to the energy problem.
Nano Energy publishes original experimental and theoretical research on all aspects of energy-related research which utilizes nanomaterials and nanotechnology. Manuscripts of four types are considered: review articles which inform readers of the latest research and advances in energy science; rapid communications which feature exciting research breakthroughs in the field; full-length articles which report comprehensive research developments; and news and opinions which comment on topical issues or express views on the developments in related fields.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


