{"title":"植物启发形状-可编程和可重构驱动软驱动器,用于自适应抓取,传感和识别","authors":"Zixu Zhang, Zhi Li, Weizhong Yuan","doi":"10.1002/smll.202501164","DOIUrl":null,"url":null,"abstract":"<p>Developing soft actuators capable of large deformations under various stimuli is crucial for applications in artificial muscles, medical devices, and beyond. However, creating intelligent soft actuators that can operate in diverse environments and perform complex tasks remains challenging. Therefore, inspired by diverse natural plants, a sandwich-structured soft actuator (LPPSA) with shape programmability and reconfigurable actuation, integrating poly(N-isopropylacrylamide) (PNIPAM) and liquid crystal elastomer (LCE) via polypropylene nonwoven fabric is designed and fabricated. Above its lower critical solution temperature (LCST), the PNIPAM hydrogel undergoes a transition from hydrophilic to hydrophobic, allowing for shape programmability of LPPSA through controlled stimuli duration and location. The LCE layer's rapid response to thermal stimuli allows LPPSA to deform quickly, while the photothermal converter (Solvent Black 7) facilitates wireless actuation under near-infrared radiation (NIR). The work demonstrates LPPSA's capabilities in underwater grasping, variable-volume gripping, and biomimetic tasks such as mimicking the opening and closing of flower petals, as well as gesture transformations. Moreover, LPPSA functions as a sensor, transmitting information on motion and temperature, and uses machine learning for underwater object shape recognition. This work establishes a template for designing multifunctional soft actuators capable of operating in diverse environments, advancing applications in soft robotics and intelligent systems.</p>","PeriodicalId":228,"journal":{"name":"Small","volume":"21 22","pages":""},"PeriodicalIF":12.1000,"publicationDate":"2025-04-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Plants Inspired Shape-Programmable and Reconfigurable Actuation Soft Actuators for Adaptive Grasping, Sensing and Recognition\",\"authors\":\"Zixu Zhang, Zhi Li, Weizhong Yuan\",\"doi\":\"10.1002/smll.202501164\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Developing soft actuators capable of large deformations under various stimuli is crucial for applications in artificial muscles, medical devices, and beyond. However, creating intelligent soft actuators that can operate in diverse environments and perform complex tasks remains challenging. Therefore, inspired by diverse natural plants, a sandwich-structured soft actuator (LPPSA) with shape programmability and reconfigurable actuation, integrating poly(N-isopropylacrylamide) (PNIPAM) and liquid crystal elastomer (LCE) via polypropylene nonwoven fabric is designed and fabricated. Above its lower critical solution temperature (LCST), the PNIPAM hydrogel undergoes a transition from hydrophilic to hydrophobic, allowing for shape programmability of LPPSA through controlled stimuli duration and location. The LCE layer's rapid response to thermal stimuli allows LPPSA to deform quickly, while the photothermal converter (Solvent Black 7) facilitates wireless actuation under near-infrared radiation (NIR). The work demonstrates LPPSA's capabilities in underwater grasping, variable-volume gripping, and biomimetic tasks such as mimicking the opening and closing of flower petals, as well as gesture transformations. Moreover, LPPSA functions as a sensor, transmitting information on motion and temperature, and uses machine learning for underwater object shape recognition. This work establishes a template for designing multifunctional soft actuators capable of operating in diverse environments, advancing applications in soft robotics and intelligent systems.</p>\",\"PeriodicalId\":228,\"journal\":{\"name\":\"Small\",\"volume\":\"21 22\",\"pages\":\"\"},\"PeriodicalIF\":12.1000,\"publicationDate\":\"2025-04-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Small\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/smll.202501164\",\"RegionNum\":2,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Small","FirstCategoryId":"88","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/smll.202501164","RegionNum":2,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
Plants Inspired Shape-Programmable and Reconfigurable Actuation Soft Actuators for Adaptive Grasping, Sensing and Recognition
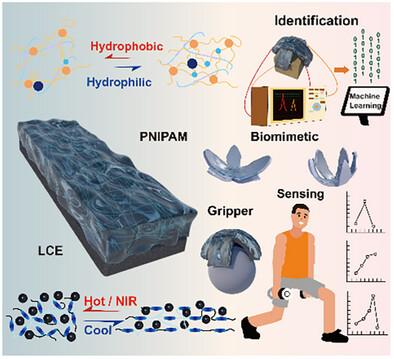
Developing soft actuators capable of large deformations under various stimuli is crucial for applications in artificial muscles, medical devices, and beyond. However, creating intelligent soft actuators that can operate in diverse environments and perform complex tasks remains challenging. Therefore, inspired by diverse natural plants, a sandwich-structured soft actuator (LPPSA) with shape programmability and reconfigurable actuation, integrating poly(N-isopropylacrylamide) (PNIPAM) and liquid crystal elastomer (LCE) via polypropylene nonwoven fabric is designed and fabricated. Above its lower critical solution temperature (LCST), the PNIPAM hydrogel undergoes a transition from hydrophilic to hydrophobic, allowing for shape programmability of LPPSA through controlled stimuli duration and location. The LCE layer's rapid response to thermal stimuli allows LPPSA to deform quickly, while the photothermal converter (Solvent Black 7) facilitates wireless actuation under near-infrared radiation (NIR). The work demonstrates LPPSA's capabilities in underwater grasping, variable-volume gripping, and biomimetic tasks such as mimicking the opening and closing of flower petals, as well as gesture transformations. Moreover, LPPSA functions as a sensor, transmitting information on motion and temperature, and uses machine learning for underwater object shape recognition. This work establishes a template for designing multifunctional soft actuators capable of operating in diverse environments, advancing applications in soft robotics and intelligent systems.
期刊介绍:
Small serves as an exceptional platform for both experimental and theoretical studies in fundamental and applied interdisciplinary research at the nano- and microscale. The journal offers a compelling mix of peer-reviewed Research Articles, Reviews, Perspectives, and Comments.
With a remarkable 2022 Journal Impact Factor of 13.3 (Journal Citation Reports from Clarivate Analytics, 2023), Small remains among the top multidisciplinary journals, covering a wide range of topics at the interface of materials science, chemistry, physics, engineering, medicine, and biology.
Small's readership includes biochemists, biologists, biomedical scientists, chemists, engineers, information technologists, materials scientists, physicists, and theoreticians alike.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


