基于角度的多目标排序和路径规划改进的a星算法
IF 5.2
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
摘要
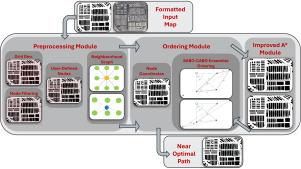
在自主移动机器人领域,对高效路径规划算法的需求是至关重要的。在各种路径规划任务和挑战中,多目标路径规划是一个特别复杂的问题,其目标是确定机器人访问多个目标节点的最有效路径。在本文中,我们引入了一种新的排序算法来优化目标节点的访问顺序。该排序基于一距离-两角度排序范式,减少了对距离作为决定因素的依赖,并结合更多的角度来收集必要的信息,从而降低了整个排序过程的计算复杂度。该算法的主干是我们开发的A*搜索算法的改进版本,通过解决算法在处理基于网格的环境时由算法性质引起的一些内部问题,进一步降低原始A*算法的距离成本。大量的实验证明了我们提出的算法的计算效率和成本效益。提出的排序算法和改进的A*的可扩展性和可重复性通过在许多不同场景的各种公开可用地图上进行测试来验证。我们还与现有的最先进的算法进行了全面的比较,以评估性能。所进行的实验报告表明,我们提出的算法在许多场景中始终优于其他算法,强调了其可靠性和潜力,可以匹配甚至超过当前多目标路径规划领域最先进的方法的性能。我们提出的算法的完整代码、地图和其他资源可在https://github.com/abdullah1aloush1/AMuGOPIA上获得。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Angle-based multi-goal ordering and path-planning using an improved A-star algorithm
In the field of autonomous mobile robotics, the demand for highly efficient path-planning algorithms is crucial. Among the various path-planning tasks and challenges, multi-goal path planning stands out as a particularly complex problem, where the objective is to determine the most efficient path for a robot to visit multiple goal nodes. In this paper, we introduce a novel ordering algorithm designed to optimize the sequence in which the goal nodes are visited. The ordering is based on a one-distance-two-angles ordering paradigm, which reduces the dependency on distances as deciding factors and incorporates more angles to gather the necessary information, thereby reducing the computational complexity of the overall ordering procedure. The backbone of the algorithm is an improved version of the A* search algorithm that we developed to further reduce the distance cost of the original A* algorithm by solving some internal issues caused by the nature of the algorithm when dealing with grid-based environments. Extensive experiments were conducted to demonstrate the computational efficiency and cost-effectiveness of our proposed algorithm. The scalability and reproducibility of the proposed ordering algorithm and the improved A* were validated by testing them on various publicly available maps in numerous different scenarios. We also performed comprehensive comparisons with existing state-of-the-art algorithms to evaluate the performance. The conducted experiments report that our proposed algorithm consistently outperformed other algorithms in numerous scenarios, underscoring its reliability and potential to match or even exceed the performance of current state-of-the-art methods in the domain of multi-goal path planning. The entire code, map and other resources of our proposed algorithms are available at https://github.com/abdullah1aloush1/AMuGOPIA.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Robotics and Autonomous Systems
工程技术-机器人学
CiteScore
9.00
自引率
7.00%
发文量
164
审稿时长
4.5 months
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


