{"title":"使用 Versius 手术平台的机器人辅助前列腺癌根治术:客观批评和最佳手术设置指南。","authors":"Mahmoud A Abdelhakim, Mohamed Abdelwahab","doi":"10.1080/20905998.2024.2442267","DOIUrl":null,"url":null,"abstract":"<p><strong>Objectives: </strong>This was an observational study aiming at providing a guide for an optimal setup of the Versius robotic system and evaluating its performance in robot-assisted radical prostatectomy (RARP).</p><p><strong>Patients and methods: </strong>Between July 2022 and December 2022, all patients with pathologically confirmed prostate cancer candidates for radical prostatectomy were included. Patients who had previous abdominal surgeries or were unfit for pneumoperitoneum were excluded. The preoperative, intraoperative, and postoperative data were prospectively collected. RARP was performed through 5 ports (12 mm); 3 for the robotic arms, 1 for the camera, and 1 for the assistant surgeon. Repeated adjustments of the patient's position and port distribution along with the bedside unit's configuration, arrangement, and orientation were made until an optimal setup was achieved. The technical malfunctions were identified in each case and fixed in the subsequent ones. All patients were invited to the follow-up clinic for routine visits on the first and second weeks following surgery and then every month for three months.</p><p><strong>Results: </strong>Thirty patients underwent the procedure without conversion to laparoscopy or open surgery and abided by the follow-up regimen. The first nine cases required frequent setup adjustments due to recurring alarms and arms-related conflicts. Thenceforth, the mean docking time, console time, urethro-vesical anastomosis time, and total operative time were enhanced in the last 21 cases without system alarms. No major intraoperative complications related to the robotic system utilization were reported. The postoperative course of all participants passed uneventfully. The median length of the hospital stay and catheterization time were 2 (1-2) and 7 (7-10) days, respectively.</p><p><strong>Conclusion: </strong>The Versius system offers a promising robotic platform with a flexible surgical setup. The proposed setup provides a guide for a smooth performance in RARP with minimal instruments' collision to eschew system failure. Being the first generation of this surgical robotic system, future efforts are still needed to improve its performance and minimize its drawbacks.</p>","PeriodicalId":8113,"journal":{"name":"Arab Journal of Urology","volume":"23 2","pages":"152-159"},"PeriodicalIF":1.2000,"publicationDate":"2024-12-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11963176/pdf/","citationCount":"0","resultStr":"{\"title\":\"Robot-assisted radical prostatectomy with the Versius surgical platform: An objective criticism and a guide for an optimal surgical setup.\",\"authors\":\"Mahmoud A Abdelhakim, Mohamed Abdelwahab\",\"doi\":\"10.1080/20905998.2024.2442267\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Objectives: </strong>This was an observational study aiming at providing a guide for an optimal setup of the Versius robotic system and evaluating its performance in robot-assisted radical prostatectomy (RARP).</p><p><strong>Patients and methods: </strong>Between July 2022 and December 2022, all patients with pathologically confirmed prostate cancer candidates for radical prostatectomy were included. Patients who had previous abdominal surgeries or were unfit for pneumoperitoneum were excluded. The preoperative, intraoperative, and postoperative data were prospectively collected. RARP was performed through 5 ports (12 mm); 3 for the robotic arms, 1 for the camera, and 1 for the assistant surgeon. Repeated adjustments of the patient's position and port distribution along with the bedside unit's configuration, arrangement, and orientation were made until an optimal setup was achieved. The technical malfunctions were identified in each case and fixed in the subsequent ones. All patients were invited to the follow-up clinic for routine visits on the first and second weeks following surgery and then every month for three months.</p><p><strong>Results: </strong>Thirty patients underwent the procedure without conversion to laparoscopy or open surgery and abided by the follow-up regimen. The first nine cases required frequent setup adjustments due to recurring alarms and arms-related conflicts. Thenceforth, the mean docking time, console time, urethro-vesical anastomosis time, and total operative time were enhanced in the last 21 cases without system alarms. No major intraoperative complications related to the robotic system utilization were reported. The postoperative course of all participants passed uneventfully. The median length of the hospital stay and catheterization time were 2 (1-2) and 7 (7-10) days, respectively.</p><p><strong>Conclusion: </strong>The Versius system offers a promising robotic platform with a flexible surgical setup. The proposed setup provides a guide for a smooth performance in RARP with minimal instruments' collision to eschew system failure. Being the first generation of this surgical robotic system, future efforts are still needed to improve its performance and minimize its drawbacks.</p>\",\"PeriodicalId\":8113,\"journal\":{\"name\":\"Arab Journal of Urology\",\"volume\":\"23 2\",\"pages\":\"152-159\"},\"PeriodicalIF\":1.2000,\"publicationDate\":\"2024-12-15\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11963176/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Arab Journal of Urology\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1080/20905998.2024.2442267\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"UROLOGY & NEPHROLOGY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Arab Journal of Urology","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1080/20905998.2024.2442267","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"UROLOGY & NEPHROLOGY","Score":null,"Total":0}
Robot-assisted radical prostatectomy with the Versius surgical platform: An objective criticism and a guide for an optimal surgical setup.
Objectives: This was an observational study aiming at providing a guide for an optimal setup of the Versius robotic system and evaluating its performance in robot-assisted radical prostatectomy (RARP).
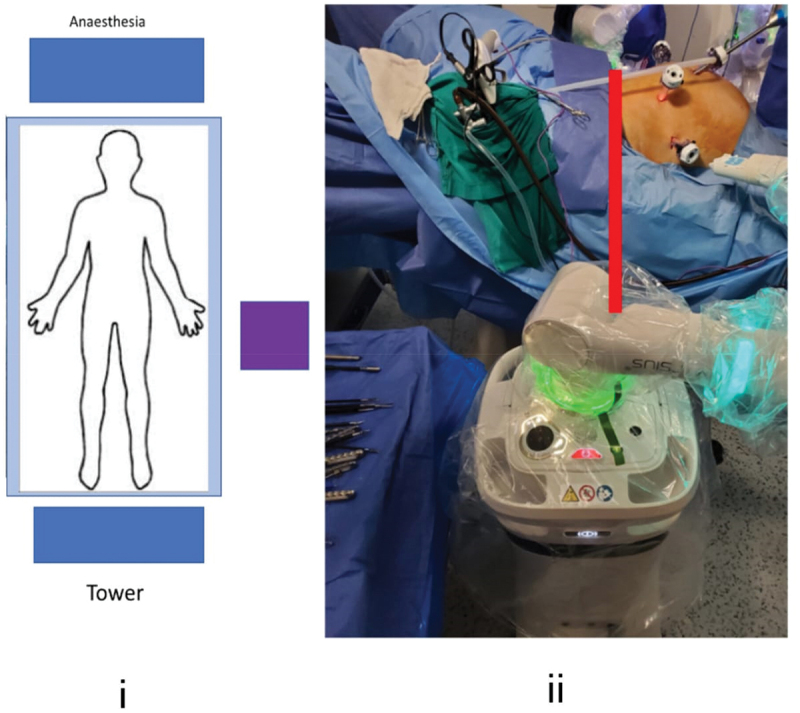
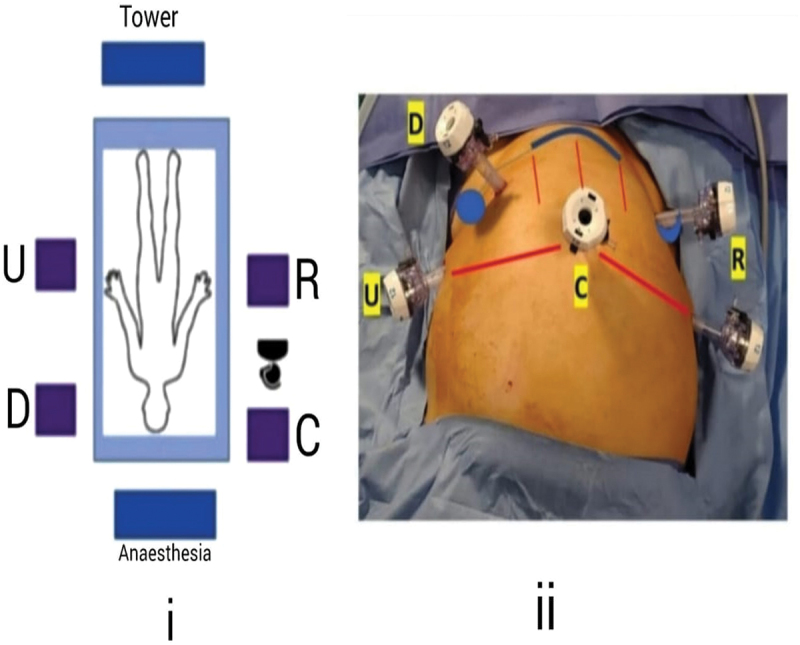
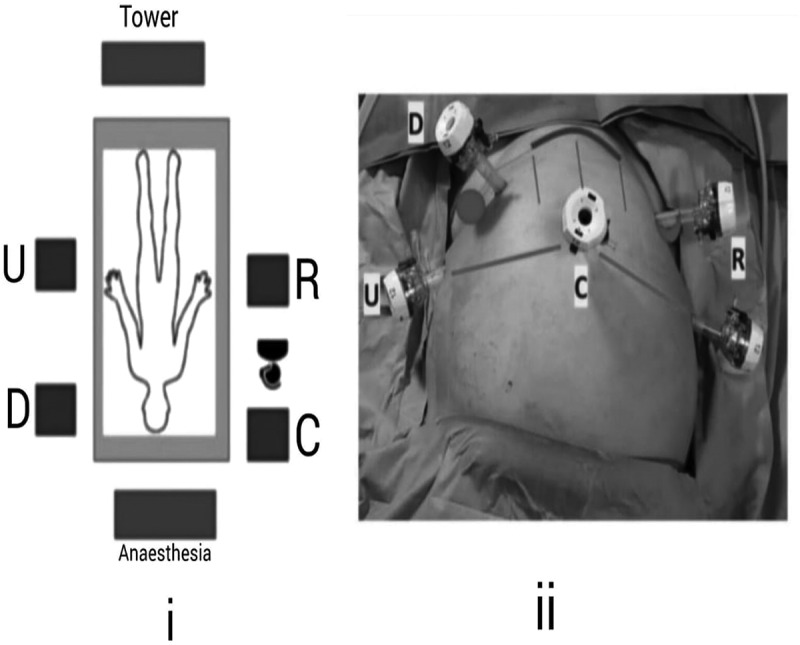
Patients and methods: Between July 2022 and December 2022, all patients with pathologically confirmed prostate cancer candidates for radical prostatectomy were included. Patients who had previous abdominal surgeries or were unfit for pneumoperitoneum were excluded. The preoperative, intraoperative, and postoperative data were prospectively collected. RARP was performed through 5 ports (12 mm); 3 for the robotic arms, 1 for the camera, and 1 for the assistant surgeon. Repeated adjustments of the patient's position and port distribution along with the bedside unit's configuration, arrangement, and orientation were made until an optimal setup was achieved. The technical malfunctions were identified in each case and fixed in the subsequent ones. All patients were invited to the follow-up clinic for routine visits on the first and second weeks following surgery and then every month for three months.
Results: Thirty patients underwent the procedure without conversion to laparoscopy or open surgery and abided by the follow-up regimen. The first nine cases required frequent setup adjustments due to recurring alarms and arms-related conflicts. Thenceforth, the mean docking time, console time, urethro-vesical anastomosis time, and total operative time were enhanced in the last 21 cases without system alarms. No major intraoperative complications related to the robotic system utilization were reported. The postoperative course of all participants passed uneventfully. The median length of the hospital stay and catheterization time were 2 (1-2) and 7 (7-10) days, respectively.
Conclusion: The Versius system offers a promising robotic platform with a flexible surgical setup. The proposed setup provides a guide for a smooth performance in RARP with minimal instruments' collision to eschew system failure. Being the first generation of this surgical robotic system, future efforts are still needed to improve its performance and minimize its drawbacks.
期刊介绍:
The Arab Journal of Urology is a peer-reviewed journal that strives to provide a high standard of research and clinical material to the widest possible urological community worldwide. The journal encompasses all aspects of urology including: urological oncology, urological reconstructive surgery, urodynamics, female urology, pediatric urology, endourology, transplantation, erectile dysfunction, and urinary infections and inflammations. The journal provides reviews, original articles, editorials, surgical techniques, cases reports and correspondence. Urologists, oncologists, pathologists, radiologists and scientists are invited to submit their contributions to make the Arab Journal of Urology a viable international forum for the practical, timely and state-of-the-art clinical urology and basic urological research.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


