Iulia Andras, Federico Piramide, Carlo Andrea Bravi, Fabrizio Di Maida, Filippo Turri, Edward Lambert, Mike Wenzel, Danny Darlington, Marco Paciotti, Giuseppe Basile, Christoph Wurnschimmel, Nikolaos Liakos, Gabriele Sorce, Ruben De Groote, Marcio Covas Moschovas, Paolo Dell'Oglio, Nicolae Crisan, Alexandre Mottrie, Alessandro Larcher
{"title":"泌尿外科新型机器人系统的系统综述和临床效果。","authors":"Iulia Andras, Federico Piramide, Carlo Andrea Bravi, Fabrizio Di Maida, Filippo Turri, Edward Lambert, Mike Wenzel, Danny Darlington, Marco Paciotti, Giuseppe Basile, Christoph Wurnschimmel, Nikolaos Liakos, Gabriele Sorce, Ruben De Groote, Marcio Covas Moschovas, Paolo Dell'Oglio, Nicolae Crisan, Alexandre Mottrie, Alessandro Larcher","doi":"10.1590/S1677-5538.IBJU.2025.0007","DOIUrl":null,"url":null,"abstract":"<p><strong>Purpose: </strong>The adoption of novel multi-port, single-port and modular robotic platforms has significantly increased in the last years. We aim to provide an overview of the preliminary clinical outcomes of the procedures performed with these new robotic systems, assessing their particular features and safety profile during the learning curve Material and methods: A systematic literature search was performed on 15th May 2023 on PubMed, Embase, Scopus and Web of Science databases, to identify original articles presenting clinical outcomes of new robotic systems for abdominal urologic surgery. The study protocol was registered on PROSPERO (CRD 42023437863).</p><p><strong>Results: </strong>Six new robotic platforms were identified. Of 2925 papers identified, 71 met our inclusion criteria: 49 on single-port system and 22 on novel multi-port systems. We found variable outcomes for the most common procedures performed with these new systems. However, all of them showed acceptable perioperative and oncologic outcomes during the learning curve and good safety profile. Functional outcomes were underreported Conclusions: The adoption of novel multi-port and single-port robotic systems in urologic surgery can offer new opportunities for enhanced precision, reduced invasiveness, and potentially improved patient outcomes. The variability in outcomes across different platforms underscores the need for continued research and standardized training.</p>","PeriodicalId":49283,"journal":{"name":"International Braz J Urol","volume":"51 4","pages":""},"PeriodicalIF":4.5000,"publicationDate":"2025-07-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12236976/pdf/","citationCount":"0","resultStr":"{\"title\":\"Systematic Review and Clinical Outcomes of new Robotic Systems in Urology.\",\"authors\":\"Iulia Andras, Federico Piramide, Carlo Andrea Bravi, Fabrizio Di Maida, Filippo Turri, Edward Lambert, Mike Wenzel, Danny Darlington, Marco Paciotti, Giuseppe Basile, Christoph Wurnschimmel, Nikolaos Liakos, Gabriele Sorce, Ruben De Groote, Marcio Covas Moschovas, Paolo Dell'Oglio, Nicolae Crisan, Alexandre Mottrie, Alessandro Larcher\",\"doi\":\"10.1590/S1677-5538.IBJU.2025.0007\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Purpose: </strong>The adoption of novel multi-port, single-port and modular robotic platforms has significantly increased in the last years. We aim to provide an overview of the preliminary clinical outcomes of the procedures performed with these new robotic systems, assessing their particular features and safety profile during the learning curve Material and methods: A systematic literature search was performed on 15th May 2023 on PubMed, Embase, Scopus and Web of Science databases, to identify original articles presenting clinical outcomes of new robotic systems for abdominal urologic surgery. The study protocol was registered on PROSPERO (CRD 42023437863).</p><p><strong>Results: </strong>Six new robotic platforms were identified. Of 2925 papers identified, 71 met our inclusion criteria: 49 on single-port system and 22 on novel multi-port systems. We found variable outcomes for the most common procedures performed with these new systems. However, all of them showed acceptable perioperative and oncologic outcomes during the learning curve and good safety profile. Functional outcomes were underreported Conclusions: The adoption of novel multi-port and single-port robotic systems in urologic surgery can offer new opportunities for enhanced precision, reduced invasiveness, and potentially improved patient outcomes. The variability in outcomes across different platforms underscores the need for continued research and standardized training.</p>\",\"PeriodicalId\":49283,\"journal\":{\"name\":\"International Braz J Urol\",\"volume\":\"51 4\",\"pages\":\"\"},\"PeriodicalIF\":4.5000,\"publicationDate\":\"2025-07-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12236976/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Braz J Urol\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://doi.org/10.1590/S1677-5538.IBJU.2025.0007\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"UROLOGY & NEPHROLOGY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Braz J Urol","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1590/S1677-5538.IBJU.2025.0007","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"UROLOGY & NEPHROLOGY","Score":null,"Total":0}
引用次数: 0
摘要
目的:近年来,新型多端口、单端口和模块化机器人平台的采用显著增加。我们的目标是概述使用这些新型机器人系统进行手术的初步临床结果,评估其在学习曲线期间的特殊特征和安全性。材料和方法:于2023年5月15日在PubMed, Embase, Scopus和Web of Science数据库上进行了系统的文献检索,以确定展示腹部泌尿外科新机器人系统临床结果的原始文章。研究方案已在PROSPERO上注册(CRD 42023437863)。结果:确定了6种新型机器人平台。在确定的2925篇论文中,71篇符合我们的纳入标准:49篇关于单端口系统,22篇关于新型多端口系统。我们发现,使用这些新系统进行的最常见手术的结果各不相同。然而,在学习曲线期间,所有患者都显示出可接受的围手术期和肿瘤预后,并且具有良好的安全性。结论:在泌尿外科手术中采用新型多端口和单端口机器人系统可以为提高精确度、减少侵入性和潜在地改善患者预后提供新的机会。不同平台之间结果的可变性强调了继续研究和标准化培训的必要性。
Systematic Review and Clinical Outcomes of new Robotic Systems in Urology.
Purpose: The adoption of novel multi-port, single-port and modular robotic platforms has significantly increased in the last years. We aim to provide an overview of the preliminary clinical outcomes of the procedures performed with these new robotic systems, assessing their particular features and safety profile during the learning curve Material and methods: A systematic literature search was performed on 15th May 2023 on PubMed, Embase, Scopus and Web of Science databases, to identify original articles presenting clinical outcomes of new robotic systems for abdominal urologic surgery. The study protocol was registered on PROSPERO (CRD 42023437863).
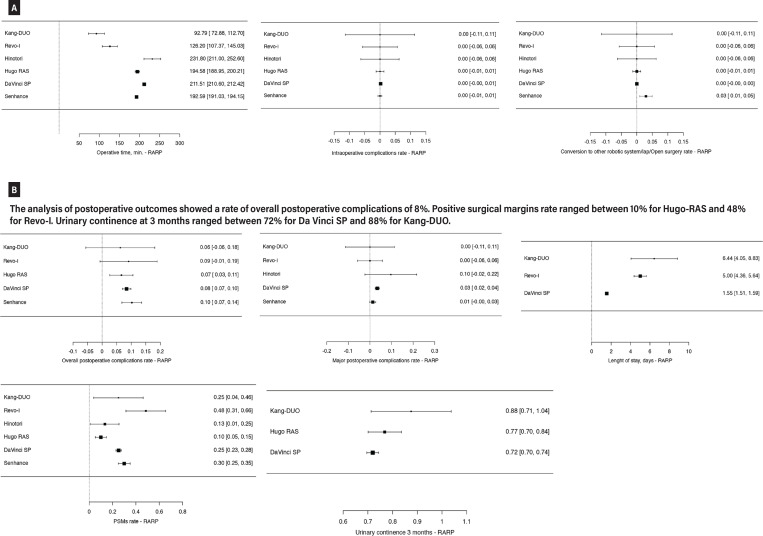
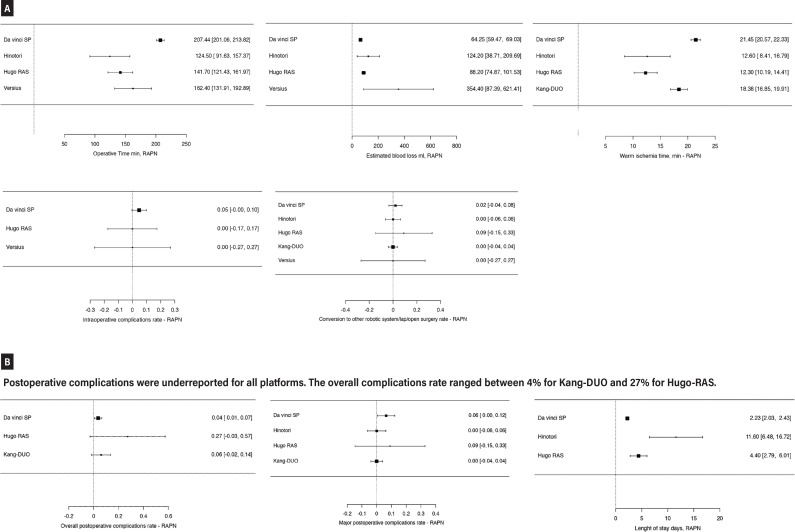
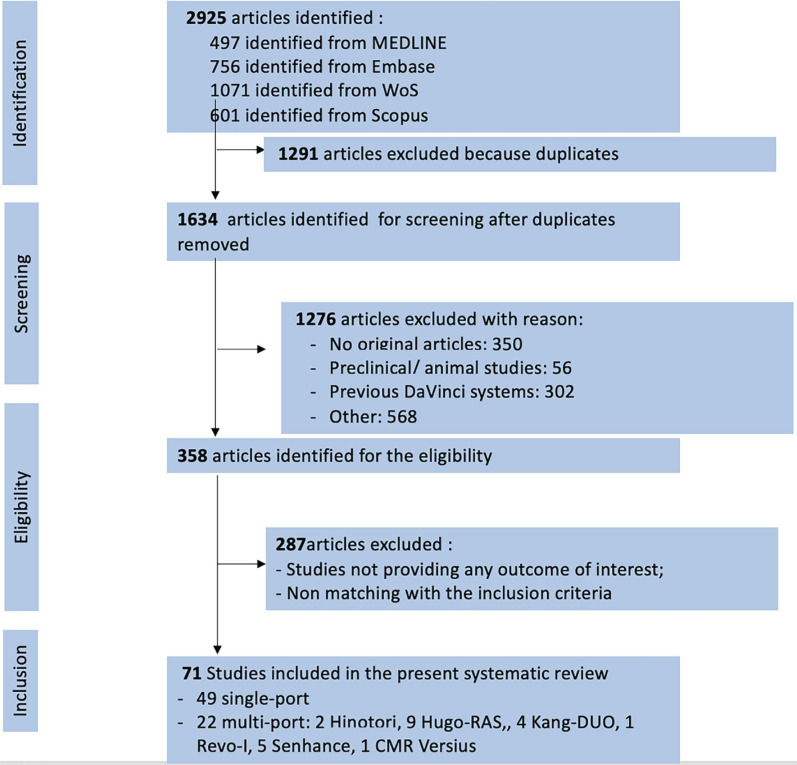
Results: Six new robotic platforms were identified. Of 2925 papers identified, 71 met our inclusion criteria: 49 on single-port system and 22 on novel multi-port systems. We found variable outcomes for the most common procedures performed with these new systems. However, all of them showed acceptable perioperative and oncologic outcomes during the learning curve and good safety profile. Functional outcomes were underreported Conclusions: The adoption of novel multi-port and single-port robotic systems in urologic surgery can offer new opportunities for enhanced precision, reduced invasiveness, and potentially improved patient outcomes. The variability in outcomes across different platforms underscores the need for continued research and standardized training.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


