Marcio Covas Moschovas, Shady Saikali, Travis Rogers, Mischa Dohler, Michael Mcdonald, Ela Patel, Jeffrey Marquinez, Ahmed Gamal, Jeffery Magnuson, Vipul Patel
{"title":"探索远程外科的远程监护潜力:奥兰多和上海同时进行的第一次远程手术。","authors":"Marcio Covas Moschovas, Shady Saikali, Travis Rogers, Mischa Dohler, Michael Mcdonald, Ela Patel, Jeffrey Marquinez, Ahmed Gamal, Jeffery Magnuson, Vipul Patel","doi":"10.1590/S1677-5538.IBJU.2025.0083","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>We performed the first study exploring telesurgery's teleproctoring potential while performing long-distance procedures between Orlando (USA) and Shanghai (China) over a distance of 13,000 km. The objective was to evaluate telesurgery's performance and teaching potential using the MicroPort® MedBot™ robotic platform and fiber-optic technology in real-time collaboration during urologic procedures.</p><p><strong>Materials and methods: </strong>We simulated a real-life scenario where surgeons could communicate and send mutual inputs during telesurgery cases. A prospective study using live porcine models was conducted on July 23-24, 2024. Surgeons in Orlando and Shanghai took turns controlling the robotic system, performing nephrectomies, pyeloplasties, and ureteroureterostomies while transferring control between locations. Latency and system performance were continuously monitored, and real-time communication between the surgeons was facilitated by fiber-optic technology.</p><p><strong>Results: </strong>Surgeons successfully completed numerous urologic procedures, including nephrectomies, pyeloplasties, and ureteroureterostomies, with seamless control transfers. Remote surgeons provided teleproctoring and assistance during the procedures. The robotic system operated without issues throughout the two-day study. The median latency was 139 milliseconds (range 137-216 ms) on the first day and 139 milliseconds (range 137-185 ms) on the second day.</p><p><strong>Conclusions: </strong>This study demonstrates the feasibility of long-distance telesurgery and highlights its potential to improve surgical outcomes, facilitate training, and offer remote assistance for complex cases. Telesurgery could play a significant role in expanding access to specialized care and enhancing robotic surgical training globally.</p>","PeriodicalId":49283,"journal":{"name":"International Braz J Urol","volume":"51 4","pages":""},"PeriodicalIF":4.5000,"publicationDate":"2025-07-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12236972/pdf/","citationCount":"0","resultStr":"{\"title\":\"Exploring the Teleproctoring Potential of Telesurgery: The First Remote Procedures Performed Simultaneously Between Orlando and Shanghai.\",\"authors\":\"Marcio Covas Moschovas, Shady Saikali, Travis Rogers, Mischa Dohler, Michael Mcdonald, Ela Patel, Jeffrey Marquinez, Ahmed Gamal, Jeffery Magnuson, Vipul Patel\",\"doi\":\"10.1590/S1677-5538.IBJU.2025.0083\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>We performed the first study exploring telesurgery's teleproctoring potential while performing long-distance procedures between Orlando (USA) and Shanghai (China) over a distance of 13,000 km. The objective was to evaluate telesurgery's performance and teaching potential using the MicroPort® MedBot™ robotic platform and fiber-optic technology in real-time collaboration during urologic procedures.</p><p><strong>Materials and methods: </strong>We simulated a real-life scenario where surgeons could communicate and send mutual inputs during telesurgery cases. A prospective study using live porcine models was conducted on July 23-24, 2024. Surgeons in Orlando and Shanghai took turns controlling the robotic system, performing nephrectomies, pyeloplasties, and ureteroureterostomies while transferring control between locations. Latency and system performance were continuously monitored, and real-time communication between the surgeons was facilitated by fiber-optic technology.</p><p><strong>Results: </strong>Surgeons successfully completed numerous urologic procedures, including nephrectomies, pyeloplasties, and ureteroureterostomies, with seamless control transfers. Remote surgeons provided teleproctoring and assistance during the procedures. The robotic system operated without issues throughout the two-day study. The median latency was 139 milliseconds (range 137-216 ms) on the first day and 139 milliseconds (range 137-185 ms) on the second day.</p><p><strong>Conclusions: </strong>This study demonstrates the feasibility of long-distance telesurgery and highlights its potential to improve surgical outcomes, facilitate training, and offer remote assistance for complex cases. Telesurgery could play a significant role in expanding access to specialized care and enhancing robotic surgical training globally.</p>\",\"PeriodicalId\":49283,\"journal\":{\"name\":\"International Braz J Urol\",\"volume\":\"51 4\",\"pages\":\"\"},\"PeriodicalIF\":4.5000,\"publicationDate\":\"2025-07-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12236972/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Braz J Urol\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://doi.org/10.1590/S1677-5538.IBJU.2025.0083\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"UROLOGY & NEPHROLOGY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Braz J Urol","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1590/S1677-5538.IBJU.2025.0083","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"UROLOGY & NEPHROLOGY","Score":null,"Total":0}
Exploring the Teleproctoring Potential of Telesurgery: The First Remote Procedures Performed Simultaneously Between Orlando and Shanghai.
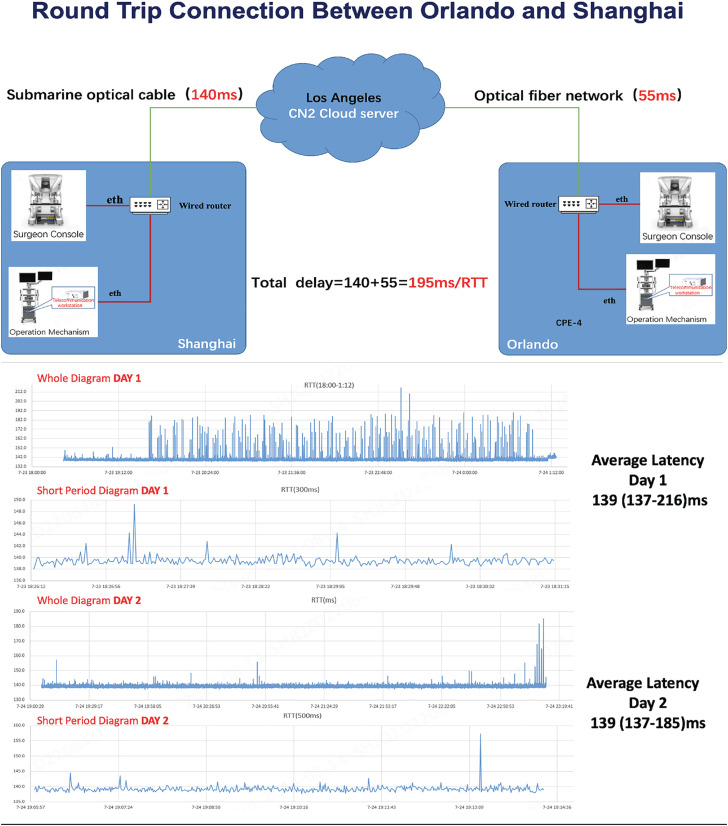
Introduction: We performed the first study exploring telesurgery's teleproctoring potential while performing long-distance procedures between Orlando (USA) and Shanghai (China) over a distance of 13,000 km. The objective was to evaluate telesurgery's performance and teaching potential using the MicroPort® MedBot™ robotic platform and fiber-optic technology in real-time collaboration during urologic procedures.
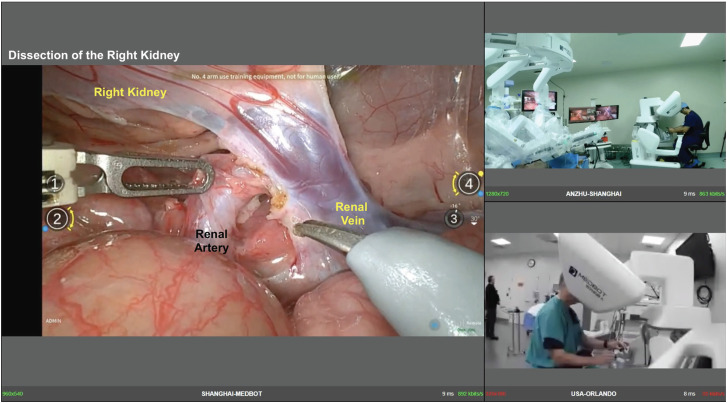
Materials and methods: We simulated a real-life scenario where surgeons could communicate and send mutual inputs during telesurgery cases. A prospective study using live porcine models was conducted on July 23-24, 2024. Surgeons in Orlando and Shanghai took turns controlling the robotic system, performing nephrectomies, pyeloplasties, and ureteroureterostomies while transferring control between locations. Latency and system performance were continuously monitored, and real-time communication between the surgeons was facilitated by fiber-optic technology.
Results: Surgeons successfully completed numerous urologic procedures, including nephrectomies, pyeloplasties, and ureteroureterostomies, with seamless control transfers. Remote surgeons provided teleproctoring and assistance during the procedures. The robotic system operated without issues throughout the two-day study. The median latency was 139 milliseconds (range 137-216 ms) on the first day and 139 milliseconds (range 137-185 ms) on the second day.
Conclusions: This study demonstrates the feasibility of long-distance telesurgery and highlights its potential to improve surgical outcomes, facilitate training, and offer remote assistance for complex cases. Telesurgery could play a significant role in expanding access to specialized care and enhancing robotic surgical training globally.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


