Chengcheng Han, Zhi Cao, Ziyao An, Zhiwei Zhang, Zhong Lin Wang, Zhiyi Wu
{"title":"用于多向力和材料识别的多模态指形触觉传感器","authors":"Chengcheng Han, Zhi Cao, Ziyao An, Zhiwei Zhang, Zhong Lin Wang, Zhiyi Wu","doi":"10.1002/adma.202414096","DOIUrl":null,"url":null,"abstract":"<p>Multimodal tactile perception is crucial for advancing human–computer interaction, but real-time multidimensional force detection and material identification remain challenging. Here, a finger-shaped tactile sensor (FTS) based on the triboelectric effect is proposed, capable of multidirectional force sensing and material identification. The FTS is composed of an external material identification section and an internal force sensing section. Three materials are embedded into the surface of the silicone shell in the fingerpad, forming single-electrode sensors for material identification. In the force sensing section, the silicone shell's outer surface is coated with conductive silver paste as a shielding layer. The inner wall has four silicone microneedle arrays and a silicone bump, while five silver electrodes are coated on the internal polylactic acid skeleton. The components connect via interlocking structures near the fingernail, allowing localized contact and separation between the silicone shell and skeleton, enabling force direction detection through signals from the five electrodes. Additionally, the outer sensors achieve 98.33% accuracy in recognizing 12 materials. Furthermore, integrated into a robotic hand, the FTS enables real-time material identification and force detection in an intelligent sorting environment. This research holds great potential for applications in tactile perception for intelligent robotics.</p>","PeriodicalId":114,"journal":{"name":"Advanced Materials","volume":"37 19","pages":""},"PeriodicalIF":26.8000,"publicationDate":"2025-03-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Multimodal Finger-Shaped Tactile Sensor for Multi-Directional Force and Material Identification\",\"authors\":\"Chengcheng Han, Zhi Cao, Ziyao An, Zhiwei Zhang, Zhong Lin Wang, Zhiyi Wu\",\"doi\":\"10.1002/adma.202414096\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Multimodal tactile perception is crucial for advancing human–computer interaction, but real-time multidimensional force detection and material identification remain challenging. Here, a finger-shaped tactile sensor (FTS) based on the triboelectric effect is proposed, capable of multidirectional force sensing and material identification. The FTS is composed of an external material identification section and an internal force sensing section. Three materials are embedded into the surface of the silicone shell in the fingerpad, forming single-electrode sensors for material identification. In the force sensing section, the silicone shell's outer surface is coated with conductive silver paste as a shielding layer. The inner wall has four silicone microneedle arrays and a silicone bump, while five silver electrodes are coated on the internal polylactic acid skeleton. The components connect via interlocking structures near the fingernail, allowing localized contact and separation between the silicone shell and skeleton, enabling force direction detection through signals from the five electrodes. Additionally, the outer sensors achieve 98.33% accuracy in recognizing 12 materials. Furthermore, integrated into a robotic hand, the FTS enables real-time material identification and force detection in an intelligent sorting environment. This research holds great potential for applications in tactile perception for intelligent robotics.</p>\",\"PeriodicalId\":114,\"journal\":{\"name\":\"Advanced Materials\",\"volume\":\"37 19\",\"pages\":\"\"},\"PeriodicalIF\":26.8000,\"publicationDate\":\"2025-03-21\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Materials\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202414096\",\"RegionNum\":1,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Materials","FirstCategoryId":"88","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202414096","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
Multimodal Finger-Shaped Tactile Sensor for Multi-Directional Force and Material Identification
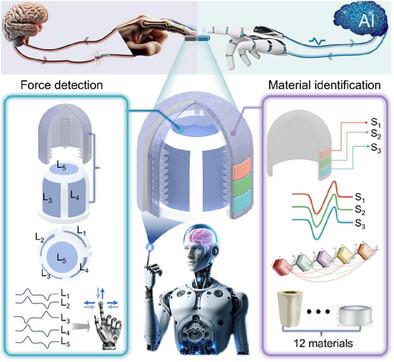
Multimodal tactile perception is crucial for advancing human–computer interaction, but real-time multidimensional force detection and material identification remain challenging. Here, a finger-shaped tactile sensor (FTS) based on the triboelectric effect is proposed, capable of multidirectional force sensing and material identification. The FTS is composed of an external material identification section and an internal force sensing section. Three materials are embedded into the surface of the silicone shell in the fingerpad, forming single-electrode sensors for material identification. In the force sensing section, the silicone shell's outer surface is coated with conductive silver paste as a shielding layer. The inner wall has four silicone microneedle arrays and a silicone bump, while five silver electrodes are coated on the internal polylactic acid skeleton. The components connect via interlocking structures near the fingernail, allowing localized contact and separation between the silicone shell and skeleton, enabling force direction detection through signals from the five electrodes. Additionally, the outer sensors achieve 98.33% accuracy in recognizing 12 materials. Furthermore, integrated into a robotic hand, the FTS enables real-time material identification and force detection in an intelligent sorting environment. This research holds great potential for applications in tactile perception for intelligent robotics.
期刊介绍:
Advanced Materials, one of the world's most prestigious journals and the foundation of the Advanced portfolio, is the home of choice for best-in-class materials science for more than 30 years. Following this fast-growing and interdisciplinary field, we are considering and publishing the most important discoveries on any and all materials from materials scientists, chemists, physicists, engineers as well as health and life scientists and bringing you the latest results and trends in modern materials-related research every week.




 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


