{"title":"用于家庭等动训练的无动力膝关节康复机器人","authors":"Yanggang Feng, Haoyang Wu, Jiaxin Ren, Wuxiang Zhang, Xiu Jia, Xiuhua Liu, Xingyu Hu, Haoxiang Jing, Yuebing Li, Yuhang Zhao, Ziyan Wang, Xuzhou Lang, Junjia Xu, Yixin Shao, Qi Su, Yuanmingfei Zhang, Mouwang Zhou, Ke Liu, Yong Nie, Jian Wang, Fuzhen Yuan, Liu Wang, Xilun Ding","doi":"10.1038/s41467-025-57578-z","DOIUrl":null,"url":null,"abstract":"<p>Robot-assisted isokinetic training has been widely adopted for knee rehabilitation. However, existing rehabilitation facilities are often heavy, bulky, and extremely energy-consuming, which limits the rehabilitation opportunities only at designated hospitals. In this study, we introduce a highly integrated and lightweight (52 kg) knee rehabilitation robot that can provide home-based isokinetic training without external power. By integrating a motor, torque/angle sensors, control circuit, and energy regeneration circuit into a single driver module, our robot can provide power-free isokinetic training by recycling mechanical work from the trainee. Ten postsurgical subjects were involved in an interventional randomized trial (ChiCTR2300076715, Part I) and the cross-sectional area of trained legs (experimental group) was significantly higher than that of untrained legs (control group). The primary outcomes, muscle growth (quadriceps: 5.93%, hamstrings: 10.27%) and strength improvements (quadriceps: 70%, hamstrings: 84%), achieved with our robots surpass those of existing commercial rehabilitation devices. These findings indicate that our robot presents a viable option for home-based knee rehabilitation, significantly enhancing the accessibility of effective treatment.</p>","PeriodicalId":19066,"journal":{"name":"Nature Communications","volume":"38 1","pages":""},"PeriodicalIF":15.7000,"publicationDate":"2025-03-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Power-free knee rehabilitation robot for home-based isokinetic training\",\"authors\":\"Yanggang Feng, Haoyang Wu, Jiaxin Ren, Wuxiang Zhang, Xiu Jia, Xiuhua Liu, Xingyu Hu, Haoxiang Jing, Yuebing Li, Yuhang Zhao, Ziyan Wang, Xuzhou Lang, Junjia Xu, Yixin Shao, Qi Su, Yuanmingfei Zhang, Mouwang Zhou, Ke Liu, Yong Nie, Jian Wang, Fuzhen Yuan, Liu Wang, Xilun Ding\",\"doi\":\"10.1038/s41467-025-57578-z\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Robot-assisted isokinetic training has been widely adopted for knee rehabilitation. However, existing rehabilitation facilities are often heavy, bulky, and extremely energy-consuming, which limits the rehabilitation opportunities only at designated hospitals. In this study, we introduce a highly integrated and lightweight (52 kg) knee rehabilitation robot that can provide home-based isokinetic training without external power. By integrating a motor, torque/angle sensors, control circuit, and energy regeneration circuit into a single driver module, our robot can provide power-free isokinetic training by recycling mechanical work from the trainee. Ten postsurgical subjects were involved in an interventional randomized trial (ChiCTR2300076715, Part I) and the cross-sectional area of trained legs (experimental group) was significantly higher than that of untrained legs (control group). The primary outcomes, muscle growth (quadriceps: 5.93%, hamstrings: 10.27%) and strength improvements (quadriceps: 70%, hamstrings: 84%), achieved with our robots surpass those of existing commercial rehabilitation devices. These findings indicate that our robot presents a viable option for home-based knee rehabilitation, significantly enhancing the accessibility of effective treatment.</p>\",\"PeriodicalId\":19066,\"journal\":{\"name\":\"Nature Communications\",\"volume\":\"38 1\",\"pages\":\"\"},\"PeriodicalIF\":15.7000,\"publicationDate\":\"2025-03-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Nature Communications\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://doi.org/10.1038/s41467-025-57578-z\",\"RegionNum\":1,\"RegionCategory\":\"综合性期刊\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MULTIDISCIPLINARY SCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Communications","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1038/s41467-025-57578-z","RegionNum":1,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
引用次数: 0
摘要
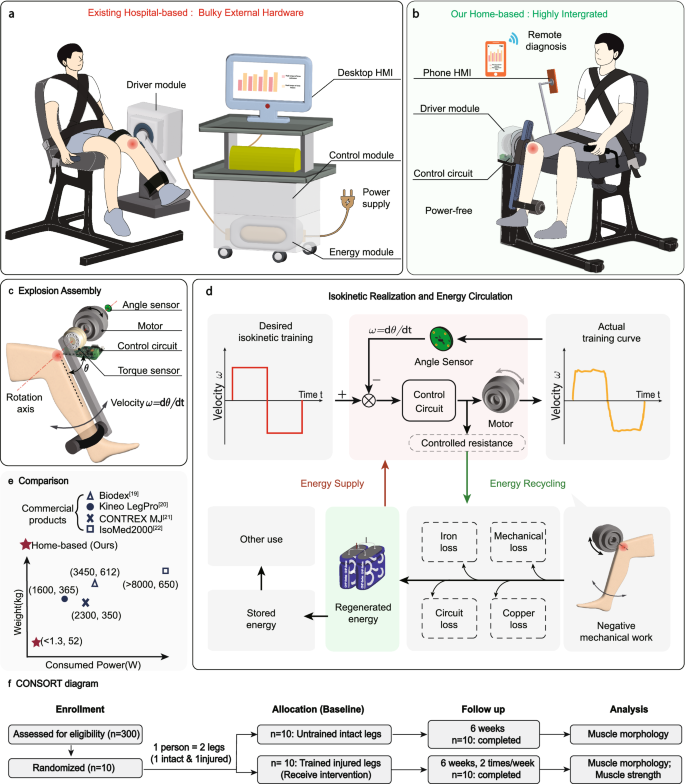
机器人辅助等速训练已被广泛应用于膝关节康复。然而,现有的康复设施往往笨重、笨重,而且极其耗能,这限制了只能在指定医院进行康复的机会。在这项研究中,我们介绍了一个高度集成和轻量级(52公斤)的膝关节康复机器人,它可以在没有外部动力的情况下提供家庭等速训练。通过将电机、扭矩/角度传感器、控制电路和能量再生电路集成到一个驱动模块中,我们的机器人可以通过回收受训者的机械功来提供无动力的等速训练。介入随机试验(ChiCTR2300076715, Part I) 10例术后受试者,训练腿(实验组)的截面积显著高于未训练腿(对照组)。我们的机器人的主要结果是肌肉增长(股四头肌:5.93%,腿筋:10.27%)和力量改善(股四头肌:70%,腿筋:84%),超过了现有的商业康复设备。这些发现表明,我们的机器人为家庭膝关节康复提供了一个可行的选择,显著提高了有效治疗的可及性。
Power-free knee rehabilitation robot for home-based isokinetic training
Robot-assisted isokinetic training has been widely adopted for knee rehabilitation. However, existing rehabilitation facilities are often heavy, bulky, and extremely energy-consuming, which limits the rehabilitation opportunities only at designated hospitals. In this study, we introduce a highly integrated and lightweight (52 kg) knee rehabilitation robot that can provide home-based isokinetic training without external power. By integrating a motor, torque/angle sensors, control circuit, and energy regeneration circuit into a single driver module, our robot can provide power-free isokinetic training by recycling mechanical work from the trainee. Ten postsurgical subjects were involved in an interventional randomized trial (ChiCTR2300076715, Part I) and the cross-sectional area of trained legs (experimental group) was significantly higher than that of untrained legs (control group). The primary outcomes, muscle growth (quadriceps: 5.93%, hamstrings: 10.27%) and strength improvements (quadriceps: 70%, hamstrings: 84%), achieved with our robots surpass those of existing commercial rehabilitation devices. These findings indicate that our robot presents a viable option for home-based knee rehabilitation, significantly enhancing the accessibility of effective treatment.
期刊介绍:
Nature Communications, an open-access journal, publishes high-quality research spanning all areas of the natural sciences. Papers featured in the journal showcase significant advances relevant to specialists in each respective field. With a 2-year impact factor of 16.6 (2022) and a median time of 8 days from submission to the first editorial decision, Nature Communications is committed to rapid dissemination of research findings. As a multidisciplinary journal, it welcomes contributions from biological, health, physical, chemical, Earth, social, mathematical, applied, and engineering sciences, aiming to highlight important breakthroughs within each domain.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


