{"title":"噪声免疫归零神经动力学在动态信号源定位系统和机器人中的应用。","authors":"Yuxin Zhao, Jiahao Wu, Mianjie Zheng","doi":"10.3389/fnbot.2025.1546731","DOIUrl":null,"url":null,"abstract":"<p><p>Time angle of arrival (AoA) and time difference of arrival (TDOA) are two widely used methods for solving dynamic signal source localization (DSSL) problems, where the position of a moving target is determined by measuring the angle and time difference of the signal's arrival, respectively. In robotic manipulator applications, accurate and real-time joint information is crucial for tasks such as trajectory tracking and visual servoing. However, signal propagation and acquisition are susceptible to noise interference, which poses challenges for real-time systems. To address this issue, a noise-immune zeroing neural dynamics (NIZND) model is proposed. The NIZND model is a brain-inspired algorithm that incorporates an integral term and an activation function into the traditional zeroing neural dynamics (ZND) model, designed to effectively mitigate noise interference during localization tasks. Theoretical analysis confirms that the proposed NIZND model exhibits global convergence and high precision under noisy conditions. Simulation experiments demonstrate the robustness and effectiveness of the NIZND model in comparison to traditional DSSL-solving schemes and in a trajectory tracking scheme for robotic manipulators. The NIZND model offers a promising solution to the challenge of accurate localization in noisy environments, ensuring both high precision and effective noise suppression. The experimental results highlight its superiority in real-time applications where noise interference is prevalent.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1546731"},"PeriodicalIF":2.8000,"publicationDate":"2025-02-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11835927/pdf/","citationCount":"0","resultStr":"{\"title\":\"Noise-immune zeroing neural dynamics for dynamic signal source localization system and robotic applications in the presence of noise.\",\"authors\":\"Yuxin Zhao, Jiahao Wu, Mianjie Zheng\",\"doi\":\"10.3389/fnbot.2025.1546731\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Time angle of arrival (AoA) and time difference of arrival (TDOA) are two widely used methods for solving dynamic signal source localization (DSSL) problems, where the position of a moving target is determined by measuring the angle and time difference of the signal's arrival, respectively. In robotic manipulator applications, accurate and real-time joint information is crucial for tasks such as trajectory tracking and visual servoing. However, signal propagation and acquisition are susceptible to noise interference, which poses challenges for real-time systems. To address this issue, a noise-immune zeroing neural dynamics (NIZND) model is proposed. The NIZND model is a brain-inspired algorithm that incorporates an integral term and an activation function into the traditional zeroing neural dynamics (ZND) model, designed to effectively mitigate noise interference during localization tasks. Theoretical analysis confirms that the proposed NIZND model exhibits global convergence and high precision under noisy conditions. Simulation experiments demonstrate the robustness and effectiveness of the NIZND model in comparison to traditional DSSL-solving schemes and in a trajectory tracking scheme for robotic manipulators. The NIZND model offers a promising solution to the challenge of accurate localization in noisy environments, ensuring both high precision and effective noise suppression. The experimental results highlight its superiority in real-time applications where noise interference is prevalent.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"19 \",\"pages\":\"1546731\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2025-02-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11835927/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2025.1546731\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1546731","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
摘要
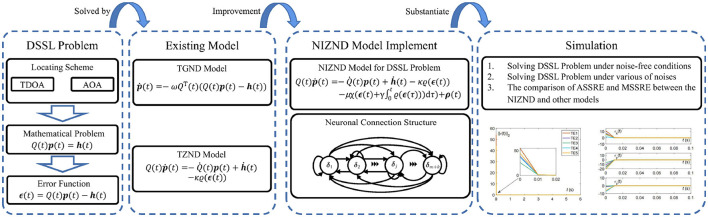
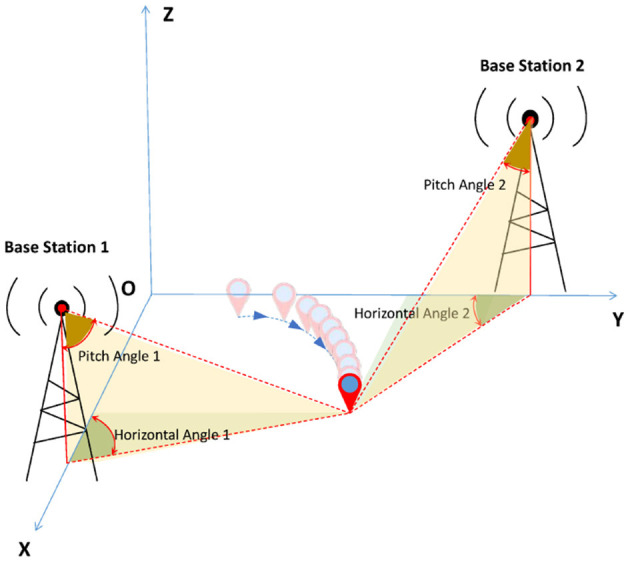
时间到达角(Time angle of arrival, AoA)和到达时间差(Time difference of arrival, TDOA)是解决动态信号源定位(dynamic signal source localization, DSSL)问题的两种常用方法,其中通过测量信号到达的角度和到达的时间差来确定运动目标的位置。在机械臂应用中,准确实时的关节信息对于轨迹跟踪和视觉伺服等任务至关重要。然而,信号的传播和采集容易受到噪声的干扰,这给实时系统带来了挑战。为了解决这一问题,提出了一种噪声免疫归零神经动力学模型。NIZND模型是一种受大脑启发的算法,它在传统的归零神经动力学(ZND)模型中加入了一个积分项和一个激活函数,旨在有效地减轻定位任务期间的噪声干扰。理论分析证实了NIZND模型在噪声条件下具有全局收敛性和较高的精度。仿真实验表明,与传统的dssl求解方案和机器人轨迹跟踪方案相比,NIZND模型具有鲁棒性和有效性。NIZND模型提供了一个很有前途的解决方案,以解决在嘈杂环境中精确定位的挑战,确保高精度和有效的噪声抑制。实验结果表明,该方法在噪声干扰普遍的实时应用中具有优越性。
Noise-immune zeroing neural dynamics for dynamic signal source localization system and robotic applications in the presence of noise.
Time angle of arrival (AoA) and time difference of arrival (TDOA) are two widely used methods for solving dynamic signal source localization (DSSL) problems, where the position of a moving target is determined by measuring the angle and time difference of the signal's arrival, respectively. In robotic manipulator applications, accurate and real-time joint information is crucial for tasks such as trajectory tracking and visual servoing. However, signal propagation and acquisition are susceptible to noise interference, which poses challenges for real-time systems. To address this issue, a noise-immune zeroing neural dynamics (NIZND) model is proposed. The NIZND model is a brain-inspired algorithm that incorporates an integral term and an activation function into the traditional zeroing neural dynamics (ZND) model, designed to effectively mitigate noise interference during localization tasks. Theoretical analysis confirms that the proposed NIZND model exhibits global convergence and high precision under noisy conditions. Simulation experiments demonstrate the robustness and effectiveness of the NIZND model in comparison to traditional DSSL-solving schemes and in a trajectory tracking scheme for robotic manipulators. The NIZND model offers a promising solution to the challenge of accurate localization in noisy environments, ensuring both high precision and effective noise suppression. The experimental results highlight its superiority in real-time applications where noise interference is prevalent.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


