{"title":"考虑交通时空相关性的基于变压器的短期交通预测模型。","authors":"Ande Chang, Yuting Ji, Yiming Bie","doi":"10.3389/fnbot.2025.1527908","DOIUrl":null,"url":null,"abstract":"<p><p>Traffic forecasting is crucial for a variety of applications, including route optimization, signal management, and travel time estimation. However, many existing prediction models struggle to accurately capture the spatiotemporal patterns in traffic data due to its inherent nonlinearity, high dimensionality, and complex dependencies. To address these challenges, a short-term traffic forecasting model, Trafficformer, is proposed based on the Transformer framework. The model first uses a multilayer perceptron to extract features from historical traffic data, then enhances spatial interactions through Transformer-based encoding. By incorporating road network topology, a spatial mask filters out noise and irrelevant interactions, improving prediction accuracy. Finally, traffic speed is predicted using another multilayer perceptron. In the experiments, Trafficformer is evaluated on the Seattle Loop Detector dataset. It is compared with six baseline methods, with Mean Absolute Error, Mean Absolute Percentage Error, and Root Mean Square Error used as metrics. The results show that Trafficformer not only has higher prediction accuracy, but also can effectively identify key sections, and has great potential in intelligent traffic control optimization and refined traffic resource allocation.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1527908"},"PeriodicalIF":2.8000,"publicationDate":"2025-01-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11799296/pdf/","citationCount":"0","resultStr":"{\"title\":\"Transformer-based short-term traffic forecasting model considering traffic spatiotemporal correlation.\",\"authors\":\"Ande Chang, Yuting Ji, Yiming Bie\",\"doi\":\"10.3389/fnbot.2025.1527908\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Traffic forecasting is crucial for a variety of applications, including route optimization, signal management, and travel time estimation. However, many existing prediction models struggle to accurately capture the spatiotemporal patterns in traffic data due to its inherent nonlinearity, high dimensionality, and complex dependencies. To address these challenges, a short-term traffic forecasting model, Trafficformer, is proposed based on the Transformer framework. The model first uses a multilayer perceptron to extract features from historical traffic data, then enhances spatial interactions through Transformer-based encoding. By incorporating road network topology, a spatial mask filters out noise and irrelevant interactions, improving prediction accuracy. Finally, traffic speed is predicted using another multilayer perceptron. In the experiments, Trafficformer is evaluated on the Seattle Loop Detector dataset. It is compared with six baseline methods, with Mean Absolute Error, Mean Absolute Percentage Error, and Root Mean Square Error used as metrics. The results show that Trafficformer not only has higher prediction accuracy, but also can effectively identify key sections, and has great potential in intelligent traffic control optimization and refined traffic resource allocation.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"19 \",\"pages\":\"1527908\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2025-01-23\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11799296/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2025.1527908\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1527908","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Transformer-based short-term traffic forecasting model considering traffic spatiotemporal correlation.
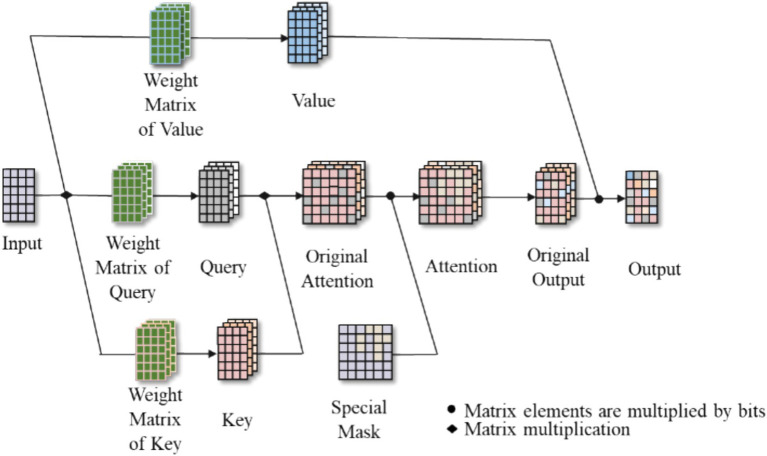
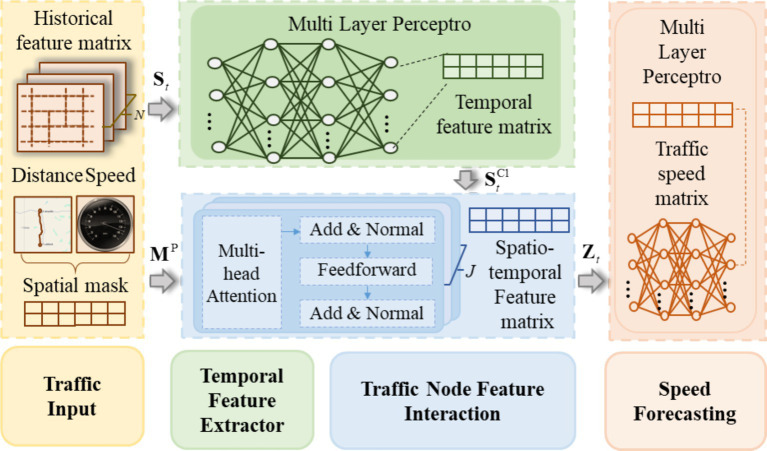
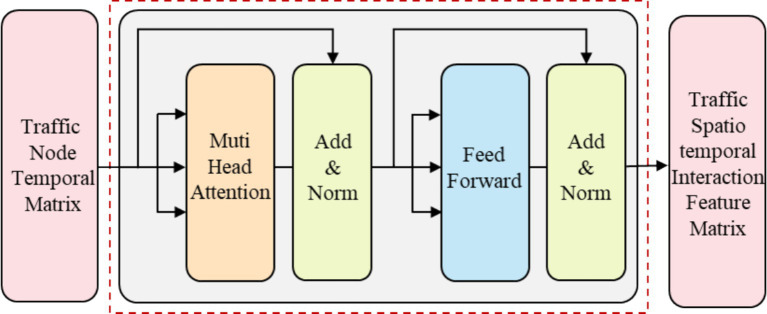
Traffic forecasting is crucial for a variety of applications, including route optimization, signal management, and travel time estimation. However, many existing prediction models struggle to accurately capture the spatiotemporal patterns in traffic data due to its inherent nonlinearity, high dimensionality, and complex dependencies. To address these challenges, a short-term traffic forecasting model, Trafficformer, is proposed based on the Transformer framework. The model first uses a multilayer perceptron to extract features from historical traffic data, then enhances spatial interactions through Transformer-based encoding. By incorporating road network topology, a spatial mask filters out noise and irrelevant interactions, improving prediction accuracy. Finally, traffic speed is predicted using another multilayer perceptron. In the experiments, Trafficformer is evaluated on the Seattle Loop Detector dataset. It is compared with six baseline methods, with Mean Absolute Error, Mean Absolute Percentage Error, and Root Mean Square Error used as metrics. The results show that Trafficformer not only has higher prediction accuracy, but also can effectively identify key sections, and has great potential in intelligent traffic control optimization and refined traffic resource allocation.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


