Cem Aygül, Can Güven, Sara A. Frunzi, Brian J. Katz, Markus P. Nemitz
{"title":"软机构驱动机器人的框架","authors":"Cem Aygül, Can Güven, Sara A. Frunzi, Brian J. Katz, Markus P. Nemitz","doi":"10.1038/s41467-025-56025-3","DOIUrl":null,"url":null,"abstract":"<p>Soft robots excel in safety and adaptability, yet their lack of structural integrity and dependency on open-curve movement paths restrict their dexterity. Conventional robots, albeit faster due to sturdy locomotion mechanisms, are typically less robust to physical impact. We introduce a multi-material design and printing framework that extends classical mechanism design to soft robotics, synergizing the strengths of soft and rigid materials while mitigating their respective limitations. Using a tool-changer equipped with multiple extruders, we blend thermoplastics of varying Shore hardness into monolithic systems. Our strategy emulates joint-like structures through biomimicry to achieve terrestrial trajectory control while inheriting the resilience of soft robots. We demonstrate the framework by 3D printing a legged soft robotic system, comparing different mechanism syntheses and material combinations, along with their resulting movement patterns and speeds. The integration of electronics and encoders provides reliable closed-loop control for the robot, enabling its operation across various terrains including sand, soil, and rock environments. This cost-effective framework offers an approach for creating 3D-printed soft robots employable in real-world environments.</p>","PeriodicalId":19066,"journal":{"name":"Nature Communications","volume":"15 1","pages":""},"PeriodicalIF":15.7000,"publicationDate":"2025-02-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A framework for soft mechanism driven robots\",\"authors\":\"Cem Aygül, Can Güven, Sara A. Frunzi, Brian J. Katz, Markus P. Nemitz\",\"doi\":\"10.1038/s41467-025-56025-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Soft robots excel in safety and adaptability, yet their lack of structural integrity and dependency on open-curve movement paths restrict their dexterity. Conventional robots, albeit faster due to sturdy locomotion mechanisms, are typically less robust to physical impact. We introduce a multi-material design and printing framework that extends classical mechanism design to soft robotics, synergizing the strengths of soft and rigid materials while mitigating their respective limitations. Using a tool-changer equipped with multiple extruders, we blend thermoplastics of varying Shore hardness into monolithic systems. Our strategy emulates joint-like structures through biomimicry to achieve terrestrial trajectory control while inheriting the resilience of soft robots. We demonstrate the framework by 3D printing a legged soft robotic system, comparing different mechanism syntheses and material combinations, along with their resulting movement patterns and speeds. The integration of electronics and encoders provides reliable closed-loop control for the robot, enabling its operation across various terrains including sand, soil, and rock environments. This cost-effective framework offers an approach for creating 3D-printed soft robots employable in real-world environments.</p>\",\"PeriodicalId\":19066,\"journal\":{\"name\":\"Nature Communications\",\"volume\":\"15 1\",\"pages\":\"\"},\"PeriodicalIF\":15.7000,\"publicationDate\":\"2025-02-07\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Nature Communications\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://doi.org/10.1038/s41467-025-56025-3\",\"RegionNum\":1,\"RegionCategory\":\"综合性期刊\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MULTIDISCIPLINARY SCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Communications","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1038/s41467-025-56025-3","RegionNum":1,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
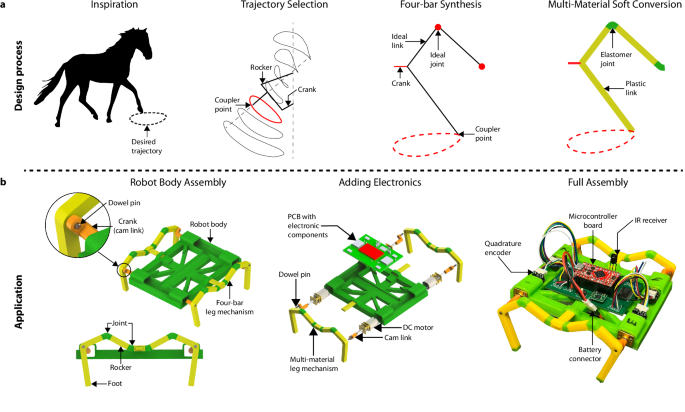
Soft robots excel in safety and adaptability, yet their lack of structural integrity and dependency on open-curve movement paths restrict their dexterity. Conventional robots, albeit faster due to sturdy locomotion mechanisms, are typically less robust to physical impact. We introduce a multi-material design and printing framework that extends classical mechanism design to soft robotics, synergizing the strengths of soft and rigid materials while mitigating their respective limitations. Using a tool-changer equipped with multiple extruders, we blend thermoplastics of varying Shore hardness into monolithic systems. Our strategy emulates joint-like structures through biomimicry to achieve terrestrial trajectory control while inheriting the resilience of soft robots. We demonstrate the framework by 3D printing a legged soft robotic system, comparing different mechanism syntheses and material combinations, along with their resulting movement patterns and speeds. The integration of electronics and encoders provides reliable closed-loop control for the robot, enabling its operation across various terrains including sand, soil, and rock environments. This cost-effective framework offers an approach for creating 3D-printed soft robots employable in real-world environments.
期刊介绍:
Nature Communications, an open-access journal, publishes high-quality research spanning all areas of the natural sciences. Papers featured in the journal showcase significant advances relevant to specialists in each respective field. With a 2-year impact factor of 16.6 (2022) and a median time of 8 days from submission to the first editorial decision, Nature Communications is committed to rapid dissemination of research findings. As a multidisciplinary journal, it welcomes contributions from biological, health, physical, chemical, Earth, social, mathematical, applied, and engineering sciences, aiming to highlight important breakthroughs within each domain.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


