Yuxuan Bi, Peng Liu, Tianyi Zhang, Jialin Shi, Caixia Wang
{"title":"多尺度稀疏卷积与点卷积自适应融合点云语义分割方法。","authors":"Yuxuan Bi, Peng Liu, Tianyi Zhang, Jialin Shi, Caixia Wang","doi":"10.1038/s41598-025-88905-5","DOIUrl":null,"url":null,"abstract":"<p><p>Semantic segmentation of LIDAR point clouds is essential for autonomous driving. However, current methods often suffer from low segmentation accuracy and feature redundancy. To address these issues, this paper proposes a novel approach based on adaptive fusion of multi-scale sparse convolution and point convolution. First, addressing the drawbacks of redundant feature extraction with existing sparse 3D convolutions, we introduce an asymmetric importance of space locations (IoSL) sparse 3D convolution module. By prioritizing the importance of input feature positions, this module enhances the sparse learning performance of critical feature information. Additionally, it strengthens the extraction capability of intrinsic feature information in both vertical and horizontal directions. Second, to mitigate significant differences between single-type and single-scale features, we propose a multi-scale feature fusion cross-gating module. This module employs gating mechanisms to improve fusion accuracy between different scale receptive fields. It utilizes a cross self-attention mechanism to adapt to the unique propagation features of point features and voxels, enhancing feature fusion performance. Experimental comparisons and ablation studies conducted on the SemanticKITTI and nuScenes datasets validate the generality and effectiveness of the proposed approach. Compared with state-of-the-art methods, our approach significantly improves accuracy and robustness.</p>","PeriodicalId":21811,"journal":{"name":"Scientific Reports","volume":"15 1","pages":"4372"},"PeriodicalIF":3.9000,"publicationDate":"2025-02-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11799315/pdf/","citationCount":"0","resultStr":"{\"title\":\"Multi-scale sparse convolution and point convolution adaptive fusion point cloud semantic segmentation method.\",\"authors\":\"Yuxuan Bi, Peng Liu, Tianyi Zhang, Jialin Shi, Caixia Wang\",\"doi\":\"10.1038/s41598-025-88905-5\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Semantic segmentation of LIDAR point clouds is essential for autonomous driving. However, current methods often suffer from low segmentation accuracy and feature redundancy. To address these issues, this paper proposes a novel approach based on adaptive fusion of multi-scale sparse convolution and point convolution. First, addressing the drawbacks of redundant feature extraction with existing sparse 3D convolutions, we introduce an asymmetric importance of space locations (IoSL) sparse 3D convolution module. By prioritizing the importance of input feature positions, this module enhances the sparse learning performance of critical feature information. Additionally, it strengthens the extraction capability of intrinsic feature information in both vertical and horizontal directions. Second, to mitigate significant differences between single-type and single-scale features, we propose a multi-scale feature fusion cross-gating module. This module employs gating mechanisms to improve fusion accuracy between different scale receptive fields. It utilizes a cross self-attention mechanism to adapt to the unique propagation features of point features and voxels, enhancing feature fusion performance. Experimental comparisons and ablation studies conducted on the SemanticKITTI and nuScenes datasets validate the generality and effectiveness of the proposed approach. Compared with state-of-the-art methods, our approach significantly improves accuracy and robustness.</p>\",\"PeriodicalId\":21811,\"journal\":{\"name\":\"Scientific Reports\",\"volume\":\"15 1\",\"pages\":\"4372\"},\"PeriodicalIF\":3.9000,\"publicationDate\":\"2025-02-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11799315/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Scientific Reports\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://doi.org/10.1038/s41598-025-88905-5\",\"RegionNum\":2,\"RegionCategory\":\"综合性期刊\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MULTIDISCIPLINARY SCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Scientific Reports","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1038/s41598-025-88905-5","RegionNum":2,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
Multi-scale sparse convolution and point convolution adaptive fusion point cloud semantic segmentation method.
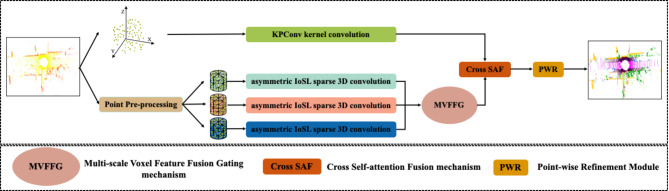
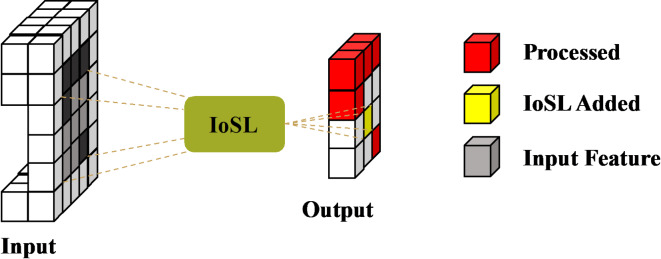
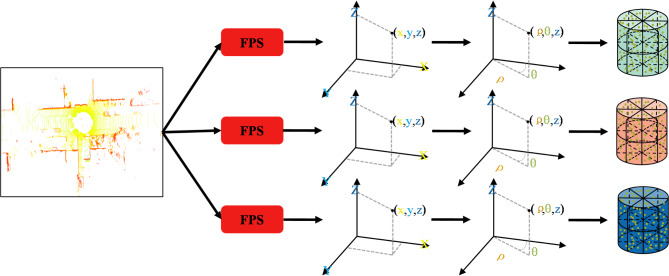
Semantic segmentation of LIDAR point clouds is essential for autonomous driving. However, current methods often suffer from low segmentation accuracy and feature redundancy. To address these issues, this paper proposes a novel approach based on adaptive fusion of multi-scale sparse convolution and point convolution. First, addressing the drawbacks of redundant feature extraction with existing sparse 3D convolutions, we introduce an asymmetric importance of space locations (IoSL) sparse 3D convolution module. By prioritizing the importance of input feature positions, this module enhances the sparse learning performance of critical feature information. Additionally, it strengthens the extraction capability of intrinsic feature information in both vertical and horizontal directions. Second, to mitigate significant differences between single-type and single-scale features, we propose a multi-scale feature fusion cross-gating module. This module employs gating mechanisms to improve fusion accuracy between different scale receptive fields. It utilizes a cross self-attention mechanism to adapt to the unique propagation features of point features and voxels, enhancing feature fusion performance. Experimental comparisons and ablation studies conducted on the SemanticKITTI and nuScenes datasets validate the generality and effectiveness of the proposed approach. Compared with state-of-the-art methods, our approach significantly improves accuracy and robustness.
期刊介绍:
We publish original research from all areas of the natural sciences, psychology, medicine and engineering. You can learn more about what we publish by browsing our specific scientific subject areas below or explore Scientific Reports by browsing all articles and collections.
Scientific Reports has a 2-year impact factor: 4.380 (2021), and is the 6th most-cited journal in the world, with more than 540,000 citations in 2020 (Clarivate Analytics, 2021).
•Engineering
Engineering covers all aspects of engineering, technology, and applied science. It plays a crucial role in the development of technologies to address some of the world''s biggest challenges, helping to save lives and improve the way we live.
•Physical sciences
Physical sciences are those academic disciplines that aim to uncover the underlying laws of nature — often written in the language of mathematics. It is a collective term for areas of study including astronomy, chemistry, materials science and physics.
•Earth and environmental sciences
Earth and environmental sciences cover all aspects of Earth and planetary science and broadly encompass solid Earth processes, surface and atmospheric dynamics, Earth system history, climate and climate change, marine and freshwater systems, and ecology. It also considers the interactions between humans and these systems.
•Biological sciences
Biological sciences encompass all the divisions of natural sciences examining various aspects of vital processes. The concept includes anatomy, physiology, cell biology, biochemistry and biophysics, and covers all organisms from microorganisms, animals to plants.
•Health sciences
The health sciences study health, disease and healthcare. This field of study aims to develop knowledge, interventions and technology for use in healthcare to improve the treatment of patients.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


