{"title":"多模态机器人武术腿部姿势识别的图卷积网络。","authors":"Shun Yao, Yihan Ping, Xiaoyu Yue, He Chen","doi":"10.3389/fnbot.2024.1520983","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Accurate recognition of martial arts leg poses is essential for applications in sports analytics, rehabilitation, and human-computer interaction. Traditional pose recognition models, relying on sequential or convolutional approaches, often struggle to capture the complex spatial-temporal dependencies inherent in martial arts movements. These methods lack the ability to effectively model the nuanced dynamics of joint interactions and temporal progression, leading to limited generalization in recognizing complex actions.</p><p><strong>Methods: </strong>To address these challenges, we propose PoseGCN, a Graph Convolutional Network (GCN)-based model that integrates spatial, temporal, and contextual features through a novel framework. PoseGCN leverages spatial-temporal graph encoding to capture joint motion dynamics, an action-specific attention mechanism to assign importance to relevant joints depending on the action context, and a self-supervised pretext task to enhance temporal robustness and continuity. Experimental results on four benchmark datasets-Kinetics-700, Human3.6M, NTU RGB+D, and UTD-MHAD-demonstrate that PoseGCN outperforms existing models, achieving state-of-the-art accuracy and F1 scores.</p><p><strong>Results and discussion: </strong>These findings highlight the model's capacity to generalize across diverse datasets and capture fine-grained pose details, showcasing its potential in advancing complex pose recognition tasks. The proposed framework offers a robust solution for precise action recognition and paves the way for future developments in multi-modal pose analysis.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"18 ","pages":"1520983"},"PeriodicalIF":2.8000,"publicationDate":"2025-01-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11792168/pdf/","citationCount":"0","resultStr":"{\"title\":\"Graph Convolutional Networks for multi-modal robotic martial arts leg pose recognition.\",\"authors\":\"Shun Yao, Yihan Ping, Xiaoyu Yue, He Chen\",\"doi\":\"10.3389/fnbot.2024.1520983\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>Accurate recognition of martial arts leg poses is essential for applications in sports analytics, rehabilitation, and human-computer interaction. Traditional pose recognition models, relying on sequential or convolutional approaches, often struggle to capture the complex spatial-temporal dependencies inherent in martial arts movements. These methods lack the ability to effectively model the nuanced dynamics of joint interactions and temporal progression, leading to limited generalization in recognizing complex actions.</p><p><strong>Methods: </strong>To address these challenges, we propose PoseGCN, a Graph Convolutional Network (GCN)-based model that integrates spatial, temporal, and contextual features through a novel framework. PoseGCN leverages spatial-temporal graph encoding to capture joint motion dynamics, an action-specific attention mechanism to assign importance to relevant joints depending on the action context, and a self-supervised pretext task to enhance temporal robustness and continuity. Experimental results on four benchmark datasets-Kinetics-700, Human3.6M, NTU RGB+D, and UTD-MHAD-demonstrate that PoseGCN outperforms existing models, achieving state-of-the-art accuracy and F1 scores.</p><p><strong>Results and discussion: </strong>These findings highlight the model's capacity to generalize across diverse datasets and capture fine-grained pose details, showcasing its potential in advancing complex pose recognition tasks. The proposed framework offers a robust solution for precise action recognition and paves the way for future developments in multi-modal pose analysis.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"18 \",\"pages\":\"1520983\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2025-01-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11792168/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2024.1520983\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2024.1520983","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Graph Convolutional Networks for multi-modal robotic martial arts leg pose recognition.
Introduction: Accurate recognition of martial arts leg poses is essential for applications in sports analytics, rehabilitation, and human-computer interaction. Traditional pose recognition models, relying on sequential or convolutional approaches, often struggle to capture the complex spatial-temporal dependencies inherent in martial arts movements. These methods lack the ability to effectively model the nuanced dynamics of joint interactions and temporal progression, leading to limited generalization in recognizing complex actions.
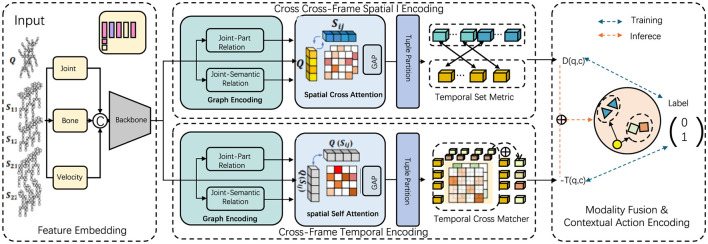
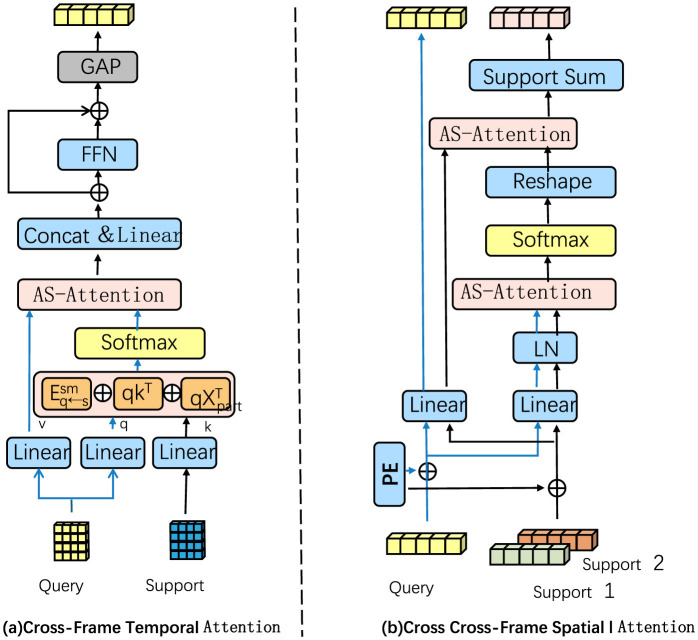
Methods: To address these challenges, we propose PoseGCN, a Graph Convolutional Network (GCN)-based model that integrates spatial, temporal, and contextual features through a novel framework. PoseGCN leverages spatial-temporal graph encoding to capture joint motion dynamics, an action-specific attention mechanism to assign importance to relevant joints depending on the action context, and a self-supervised pretext task to enhance temporal robustness and continuity. Experimental results on four benchmark datasets-Kinetics-700, Human3.6M, NTU RGB+D, and UTD-MHAD-demonstrate that PoseGCN outperforms existing models, achieving state-of-the-art accuracy and F1 scores.
Results and discussion: These findings highlight the model's capacity to generalize across diverse datasets and capture fine-grained pose details, showcasing its potential in advancing complex pose recognition tasks. The proposed framework offers a robust solution for precise action recognition and paves the way for future developments in multi-modal pose analysis.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


