Hong Chen, Haili Qin, Xin Yao, Huai-Ping Cong, Shu-Hong Yu
{"title":"纳米线组件的不相容几何调节使光驱动形状变形和运动","authors":"Hong Chen, Haili Qin, Xin Yao, Huai-Ping Cong, Shu-Hong Yu","doi":"10.1002/adma.202418730","DOIUrl":null,"url":null,"abstract":"<p>Photoresponsive shape-changing materials have significant applications in miniaturized smart robotics and biomedicine powered in a remote and wireless manner. Existing light-fuelled soft materials suffer from limited continuous shape manipulation and constrained mobility and locomotive modes. One promising solution is developing a hierarchical structure design approach to integrate rapid, reversible photoactive molecular alignment and mechanically incompatible geometry in a macroscopic system. Here, a nanowire assemblies-induced geometry engineering method is reported for the fabrication of silver nanowire-incorporated nematic liquid crystalline elastomers with prominent anisotropic structures at multi-length scales and incompatible elasticity that show sharp morphological transitions among the rings, helicoids, and spirals with diverse helical configurations. The engineered composite films can realize complex light-driven motions including rotating, rolling, and jumping with the controlled directionality and magnitude that are pre-encoded in their both molecular and macroscopic configurations. Owing to the great controllability of multimodal locomotion, a spiral robot can undertake task-specific configuration to climb up complex terrains. The complete regulatory relationship among molecular orientation, shape geometry, and light-driven motions is also established. This study may open an avenue for elaborate design and precise fabrication of novel shape-morphing materials for future applications in intelligent robotic systems.</p>","PeriodicalId":114,"journal":{"name":"Advanced Materials","volume":"37 11","pages":""},"PeriodicalIF":26.8000,"publicationDate":"2025-02-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Incompatible Geometry Regulation of Nanowire Assemblies Enabled Light-Driven Shape Morphing and Motions\",\"authors\":\"Hong Chen, Haili Qin, Xin Yao, Huai-Ping Cong, Shu-Hong Yu\",\"doi\":\"10.1002/adma.202418730\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Photoresponsive shape-changing materials have significant applications in miniaturized smart robotics and biomedicine powered in a remote and wireless manner. Existing light-fuelled soft materials suffer from limited continuous shape manipulation and constrained mobility and locomotive modes. One promising solution is developing a hierarchical structure design approach to integrate rapid, reversible photoactive molecular alignment and mechanically incompatible geometry in a macroscopic system. Here, a nanowire assemblies-induced geometry engineering method is reported for the fabrication of silver nanowire-incorporated nematic liquid crystalline elastomers with prominent anisotropic structures at multi-length scales and incompatible elasticity that show sharp morphological transitions among the rings, helicoids, and spirals with diverse helical configurations. The engineered composite films can realize complex light-driven motions including rotating, rolling, and jumping with the controlled directionality and magnitude that are pre-encoded in their both molecular and macroscopic configurations. Owing to the great controllability of multimodal locomotion, a spiral robot can undertake task-specific configuration to climb up complex terrains. The complete regulatory relationship among molecular orientation, shape geometry, and light-driven motions is also established. This study may open an avenue for elaborate design and precise fabrication of novel shape-morphing materials for future applications in intelligent robotic systems.</p>\",\"PeriodicalId\":114,\"journal\":{\"name\":\"Advanced Materials\",\"volume\":\"37 11\",\"pages\":\"\"},\"PeriodicalIF\":26.8000,\"publicationDate\":\"2025-02-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Materials\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202418730\",\"RegionNum\":1,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Materials","FirstCategoryId":"88","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202418730","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
Incompatible Geometry Regulation of Nanowire Assemblies Enabled Light-Driven Shape Morphing and Motions
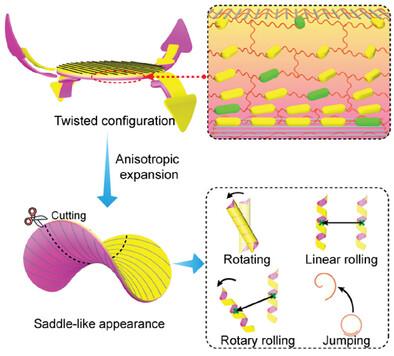
Photoresponsive shape-changing materials have significant applications in miniaturized smart robotics and biomedicine powered in a remote and wireless manner. Existing light-fuelled soft materials suffer from limited continuous shape manipulation and constrained mobility and locomotive modes. One promising solution is developing a hierarchical structure design approach to integrate rapid, reversible photoactive molecular alignment and mechanically incompatible geometry in a macroscopic system. Here, a nanowire assemblies-induced geometry engineering method is reported for the fabrication of silver nanowire-incorporated nematic liquid crystalline elastomers with prominent anisotropic structures at multi-length scales and incompatible elasticity that show sharp morphological transitions among the rings, helicoids, and spirals with diverse helical configurations. The engineered composite films can realize complex light-driven motions including rotating, rolling, and jumping with the controlled directionality and magnitude that are pre-encoded in their both molecular and macroscopic configurations. Owing to the great controllability of multimodal locomotion, a spiral robot can undertake task-specific configuration to climb up complex terrains. The complete regulatory relationship among molecular orientation, shape geometry, and light-driven motions is also established. This study may open an avenue for elaborate design and precise fabrication of novel shape-morphing materials for future applications in intelligent robotic systems.
期刊介绍:
Advanced Materials, one of the world's most prestigious journals and the foundation of the Advanced portfolio, is the home of choice for best-in-class materials science for more than 30 years. Following this fast-growing and interdisciplinary field, we are considering and publishing the most important discoveries on any and all materials from materials scientists, chemists, physicists, engineers as well as health and life scientists and bringing you the latest results and trends in modern materials-related research every week.




 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


