{"title":"FusionU10:通过多模态融合增强低照度复杂旅游场景中的行人检测。","authors":"Xuefan Zhou, Jiapeng Li, Yingzheng Li","doi":"10.3389/fnbot.2024.1504070","DOIUrl":null,"url":null,"abstract":"<p><p>With the rapid development of tourism, the concentration of visitor flows poses significant challenges for public safety management, especially in low-light and highly occluded environments, where existing pedestrian detection technologies often struggle to achieve satisfactory accuracy. Although infrared images perform well under low-light conditions, they lack color and detail, making them susceptible to background noise interference, particularly in complex outdoor environments where the similarity between heat sources and pedestrian features further reduces detection accuracy. To address these issues, this paper proposes the FusionU10 model, which combines information from both infrared and visible light images. The model first incorporates an Attention Gate mechanism (AGUNet) into an improved UNet architecture to focus on key features and generate pseudo-color images, followed by pedestrian detection using YOLOv10. During the prediction phase, the model optimizes the loss function with Complete Intersection over Union (CIoU), objectness loss (obj loss), and classification loss (cls loss), thereby enhancing the performance of the detection network and improving the quality and feature extraction capabilities of the pseudo-color images through a feedback mechanism. Experimental results demonstrate that FusionU10 significantly improves detection accuracy and robustness in complex scenes on the FLIR, M3FD, and LLVIP datasets, showing great potential for application in challenging environments.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"18 ","pages":"1504070"},"PeriodicalIF":2.8000,"publicationDate":"2025-01-10","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11757253/pdf/","citationCount":"0","resultStr":"{\"title\":\"FusionU10: enhancing pedestrian detection in low-light complex tourist scenes through multimodal fusion.\",\"authors\":\"Xuefan Zhou, Jiapeng Li, Yingzheng Li\",\"doi\":\"10.3389/fnbot.2024.1504070\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>With the rapid development of tourism, the concentration of visitor flows poses significant challenges for public safety management, especially in low-light and highly occluded environments, where existing pedestrian detection technologies often struggle to achieve satisfactory accuracy. Although infrared images perform well under low-light conditions, they lack color and detail, making them susceptible to background noise interference, particularly in complex outdoor environments where the similarity between heat sources and pedestrian features further reduces detection accuracy. To address these issues, this paper proposes the FusionU10 model, which combines information from both infrared and visible light images. The model first incorporates an Attention Gate mechanism (AGUNet) into an improved UNet architecture to focus on key features and generate pseudo-color images, followed by pedestrian detection using YOLOv10. During the prediction phase, the model optimizes the loss function with Complete Intersection over Union (CIoU), objectness loss (obj loss), and classification loss (cls loss), thereby enhancing the performance of the detection network and improving the quality and feature extraction capabilities of the pseudo-color images through a feedback mechanism. Experimental results demonstrate that FusionU10 significantly improves detection accuracy and robustness in complex scenes on the FLIR, M3FD, and LLVIP datasets, showing great potential for application in challenging environments.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"18 \",\"pages\":\"1504070\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2025-01-10\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11757253/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2024.1504070\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2024.1504070","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
摘要
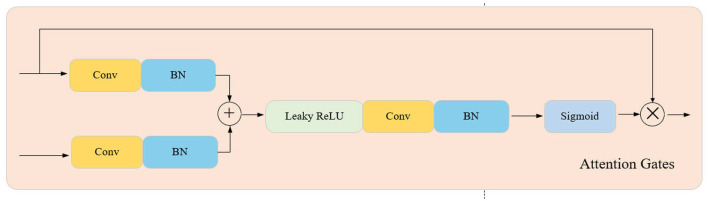
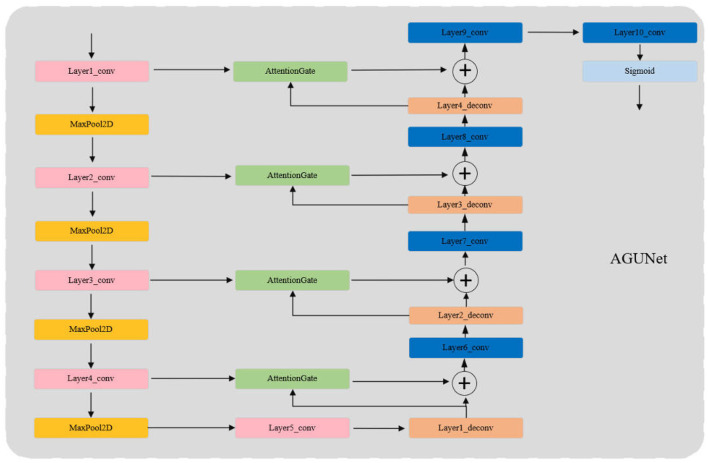
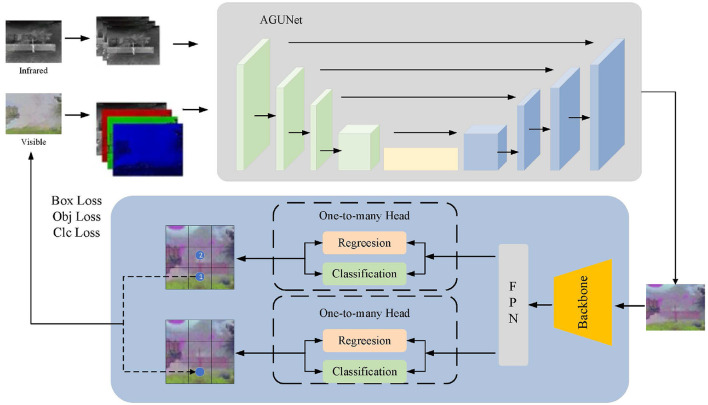
随着旅游业的快速发展,客流的集中给公共安全管理带来了巨大的挑战,特别是在低光照和高度闭塞的环境中,现有的行人检测技术往往难以达到令人满意的精度。尽管红外图像在弱光条件下表现良好,但它们缺乏色彩和细节,容易受到背景噪声干扰,特别是在复杂的室外环境中,热源和行人特征之间的相似性进一步降低了检测精度。为了解决这些问题,本文提出了结合红外和可见光图像信息的FusionU10模型。该模型首先将注意力门机制(AGUNet)整合到改进的UNet架构中,以聚焦关键特征并生成伪彩色图像,然后使用YOLOv10进行行人检测。在预测阶段,模型通过CIoU (Complete Intersection over Union)、obj loss (object loss)和cls loss (classification loss)对损失函数进行优化,从而增强检测网络的性能,通过反馈机制提高伪彩色图像的质量和特征提取能力。实验结果表明,在FLIR、M3FD和LLVIP数据集上,FusionU10显著提高了复杂场景下的检测精度和鲁棒性,在具有挑战性的环境中具有很大的应用潜力。
FusionU10: enhancing pedestrian detection in low-light complex tourist scenes through multimodal fusion.
With the rapid development of tourism, the concentration of visitor flows poses significant challenges for public safety management, especially in low-light and highly occluded environments, where existing pedestrian detection technologies often struggle to achieve satisfactory accuracy. Although infrared images perform well under low-light conditions, they lack color and detail, making them susceptible to background noise interference, particularly in complex outdoor environments where the similarity between heat sources and pedestrian features further reduces detection accuracy. To address these issues, this paper proposes the FusionU10 model, which combines information from both infrared and visible light images. The model first incorporates an Attention Gate mechanism (AGUNet) into an improved UNet architecture to focus on key features and generate pseudo-color images, followed by pedestrian detection using YOLOv10. During the prediction phase, the model optimizes the loss function with Complete Intersection over Union (CIoU), objectness loss (obj loss), and classification loss (cls loss), thereby enhancing the performance of the detection network and improving the quality and feature extraction capabilities of the pseudo-color images through a feedback mechanism. Experimental results demonstrate that FusionU10 significantly improves detection accuracy and robustness in complex scenes on the FLIR, M3FD, and LLVIP datasets, showing great potential for application in challenging environments.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


