Hao Yang, Zhe Tao, Jian Yang, Wenpeng Ma, Haoyu Zhang, Min Xu, Ming Wu, Shuaishuai Sun, Hu Jin, Weihua Li, Liu Wang, Shiwu Zhang
{"title":"一个轻量级的假肢,具有19自由度的灵巧性和人类水平的功能","authors":"Hao Yang, Zhe Tao, Jian Yang, Wenpeng Ma, Haoyu Zhang, Min Xu, Ming Wu, Shuaishuai Sun, Hu Jin, Weihua Li, Liu Wang, Shiwu Zhang","doi":"10.1038/s41467-025-56352-5","DOIUrl":null,"url":null,"abstract":"<p>A human hand has 23-degree-of-freedom (DOF) dexterity for managing activities of daily living (ADLs). Current prosthetic hands, primarily driven by motors or pneumatic actuators, fall short in replicating human-level functions, primarily due to limited DOF. Here, we develop a lightweight prosthetic hand that possesses biomimetic 19-DOF dexterity by integrating 38 shape-memory alloy (SMA) actuators to precisely control five fingers and the wrist. The prosthetic hand features real-time sensing of joint angles in each finger, feeding data into a control module for selectively heating or cooling SMA actuators in a closed-loop manner, mimicking the functioning of human muscles. Enabled by the high-power density of SMAs, the hand part (from the wrist to the fingertip) only weighs 0.22 kg, much lower than existing products. We also integrate an onboard power management module that provides electricity for operating the entire system. In addition to 33 standard grasping modes, this prosthetic hand supports 6 advanced grasping modes designed for enhanced dexterity evaluation, expanding the range of achievable ADLs for amputees while facilitating standard prosthesis function tests and validation in real-world scenarios. This innovation offers a significant advancement in prosthetic hand functions, promising improved quality of life for users.</p>","PeriodicalId":19066,"journal":{"name":"Nature Communications","volume":"38 1","pages":""},"PeriodicalIF":15.7000,"publicationDate":"2025-01-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A lightweight prosthetic hand with 19-DOF dexterity and human-level functions\",\"authors\":\"Hao Yang, Zhe Tao, Jian Yang, Wenpeng Ma, Haoyu Zhang, Min Xu, Ming Wu, Shuaishuai Sun, Hu Jin, Weihua Li, Liu Wang, Shiwu Zhang\",\"doi\":\"10.1038/s41467-025-56352-5\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>A human hand has 23-degree-of-freedom (DOF) dexterity for managing activities of daily living (ADLs). Current prosthetic hands, primarily driven by motors or pneumatic actuators, fall short in replicating human-level functions, primarily due to limited DOF. Here, we develop a lightweight prosthetic hand that possesses biomimetic 19-DOF dexterity by integrating 38 shape-memory alloy (SMA) actuators to precisely control five fingers and the wrist. The prosthetic hand features real-time sensing of joint angles in each finger, feeding data into a control module for selectively heating or cooling SMA actuators in a closed-loop manner, mimicking the functioning of human muscles. Enabled by the high-power density of SMAs, the hand part (from the wrist to the fingertip) only weighs 0.22 kg, much lower than existing products. We also integrate an onboard power management module that provides electricity for operating the entire system. In addition to 33 standard grasping modes, this prosthetic hand supports 6 advanced grasping modes designed for enhanced dexterity evaluation, expanding the range of achievable ADLs for amputees while facilitating standard prosthesis function tests and validation in real-world scenarios. This innovation offers a significant advancement in prosthetic hand functions, promising improved quality of life for users.</p>\",\"PeriodicalId\":19066,\"journal\":{\"name\":\"Nature Communications\",\"volume\":\"38 1\",\"pages\":\"\"},\"PeriodicalIF\":15.7000,\"publicationDate\":\"2025-01-22\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Nature Communications\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://doi.org/10.1038/s41467-025-56352-5\",\"RegionNum\":1,\"RegionCategory\":\"综合性期刊\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MULTIDISCIPLINARY SCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Communications","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1038/s41467-025-56352-5","RegionNum":1,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
A lightweight prosthetic hand with 19-DOF dexterity and human-level functions
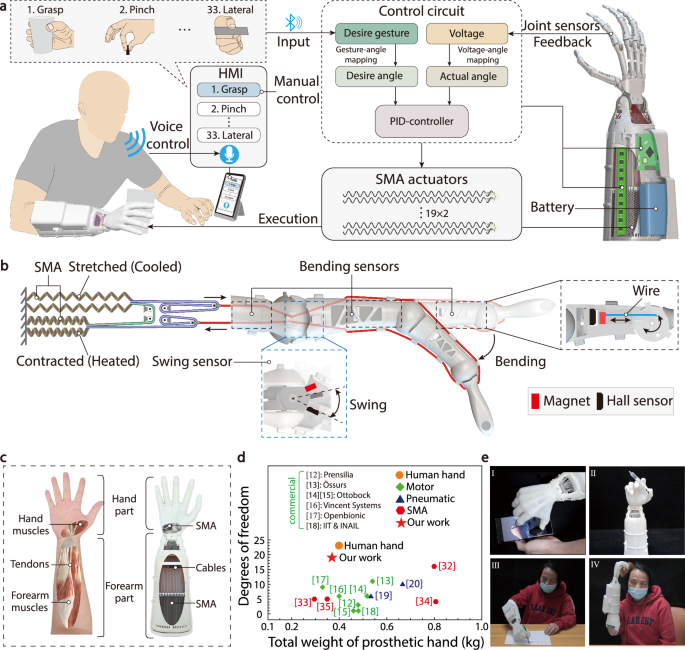
A human hand has 23-degree-of-freedom (DOF) dexterity for managing activities of daily living (ADLs). Current prosthetic hands, primarily driven by motors or pneumatic actuators, fall short in replicating human-level functions, primarily due to limited DOF. Here, we develop a lightweight prosthetic hand that possesses biomimetic 19-DOF dexterity by integrating 38 shape-memory alloy (SMA) actuators to precisely control five fingers and the wrist. The prosthetic hand features real-time sensing of joint angles in each finger, feeding data into a control module for selectively heating or cooling SMA actuators in a closed-loop manner, mimicking the functioning of human muscles. Enabled by the high-power density of SMAs, the hand part (from the wrist to the fingertip) only weighs 0.22 kg, much lower than existing products. We also integrate an onboard power management module that provides electricity for operating the entire system. In addition to 33 standard grasping modes, this prosthetic hand supports 6 advanced grasping modes designed for enhanced dexterity evaluation, expanding the range of achievable ADLs for amputees while facilitating standard prosthesis function tests and validation in real-world scenarios. This innovation offers a significant advancement in prosthetic hand functions, promising improved quality of life for users.
期刊介绍:
Nature Communications, an open-access journal, publishes high-quality research spanning all areas of the natural sciences. Papers featured in the journal showcase significant advances relevant to specialists in each respective field. With a 2-year impact factor of 16.6 (2022) and a median time of 8 days from submission to the first editorial decision, Nature Communications is committed to rapid dissemination of research findings. As a multidisciplinary journal, it welcomes contributions from biological, health, physical, chemical, Earth, social, mathematical, applied, and engineering sciences, aiming to highlight important breakthroughs within each domain.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


