用于软抓手力和滑移检测的三压电耦合传感器
IF 16.8
1区 材料科学
Q1 CHEMISTRY, PHYSICAL
引用次数: 0
摘要
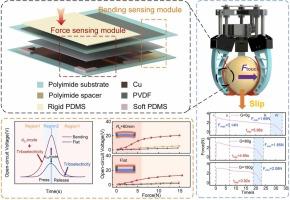
应用最小的抓握力来抓住易碎物体而不打滑是软爪非破坏性和稳定操作的关键挑战。目前,软爪的力测量主要基于电阻式传感器,其灵敏度较低或线性范围有限。此外,对于接触驱动变形软爪弯曲接触面的滑移检测和最小抓取力的确定研究较少。本文提出了一种基于摩擦-压电耦合纳米发电机(TPENG)的力与滑移检测传感器(FSS),通过软夹持器的滑移阈值确定物体的最小抓取力。结果表明,在柔性夹持器的弯曲工作状态下,挠性电效应、摩擦电效应以及d33和d31模式的压电效应增强了摩擦压电耦合效应,使得柔性夹持器在弯曲半径为30 mm时的灵敏度比平面状态提高了3.62倍。其次,通过优化FSS中聚二甲基硅氧烷(PDMS)垫片的弹性模量和尺寸,提高了FSS的线性范围,在0 ~ 6 N的宽力范围内实现了4.35 V/N的高灵敏度,并基于FSS弯曲半径与灵敏度的关系设计了FSS同时识别力和弯曲半径的算法。最后,通过监测FSS与物体的接触状态,确定滑移阈值和最小抓握力。结果表明,物体质量越小,表面曲率半径越小,采用指垫抓握方式抓握物体的滑移阈值越低,抓握力越小。FSS通过软爪在智能感知环境方面具有良好的应用前景。本文章由计算机程序翻译,如有差异,请以英文原文为准。
A tribo-piezoelectric coupled sensor for force and slip detection in soft grippers
Applying the minimum grasping force to hold fragile objects without slippage is a critical challenge for non-destructive and stable manipulation by soft grippers. Currently, force measurement in soft grippers is mainly based on resistive sensors, which suffer from lower sensitivity or limited linear range. Moreover, limited research has been conducted on slip detection and the minimum grasping force determination on the bending contact surface of soft grippers with contact-driven deformation. In this manuscript, a force and slip detection sensor (FSS) based on tribo-piezoelectric coupled nanogenerators (TPENG) is proposed to determine the minimum grasping force for objects through the slipping threshold in soft grippers. It is shown that in the bending operation state of the soft gripper, the tribo-piezoelectric coupling effect is enhanced by the flexoelectric, triboelectric effects and the piezoelectric effect with d33 and d31 modes, which can provide the FSS with 3.62 times higher sensitivity at a bending radius of 30 mm compared with the flat state. Next, by optimizing the elastic modulus and dimensions of the Polydimethylsiloxane (PDMS) spacers in the FSS, the linear range of the FSS is improved, achieving a high sensitivity of 4.35 V/N over a broad force range of 0–6 N. Moreover, an algorithm is designed for the FSS to simultaneously recognize force and bending radius based on the relationship between the bending radius and the sensitivity of the FSS. Finally, the slipping threshold and the minimum grasping force are determined by monitoring the contact state between the FSS and the object. The results indicate that smaller object mass, reduced surface curvature radius, and grasping method using the finger pad lead to lower slipping threshold and minimum grasping force. The FSS will have good application prospects in the intelligent perception of the environment through soft grippers.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
Nano Energy
CHEMISTRY, PHYSICAL-NANOSCIENCE & NANOTECHNOLOGY
CiteScore
30.30
自引率
7.40%
发文量
1207
审稿时长
23 days
期刊介绍:
Nano Energy is a multidisciplinary, rapid-publication forum of original peer-reviewed contributions on the science and engineering of nanomaterials and nanodevices used in all forms of energy harvesting, conversion, storage, utilization and policy. Through its mixture of articles, reviews, communications, research news, and information on key developments, Nano Energy provides a comprehensive coverage of this exciting and dynamic field which joins nanoscience and nanotechnology with energy science. The journal is relevant to all those who are interested in nanomaterials solutions to the energy problem.
Nano Energy publishes original experimental and theoretical research on all aspects of energy-related research which utilizes nanomaterials and nanotechnology. Manuscripts of four types are considered: review articles which inform readers of the latest research and advances in energy science; rapid communications which feature exciting research breakthroughs in the field; full-length articles which report comprehensive research developments; and news and opinions which comment on topical issues or express views on the developments in related fields.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


