{"title":"静电平面内结构超润滑驱动器","authors":"Xuanyu Huang, Xiaojian Xiang, Chuang Li, Jinhui Nie, Yifan Shao, Zhiping Xu, Quanshui Zheng","doi":"10.1038/s41467-024-55078-0","DOIUrl":null,"url":null,"abstract":"<p>Micro actuators are widely used in NEMS/MEMS for control and sensing. However, most are designed with suspended beams anchored at fixed points, causing two main issues: restricted actuated stroke and movement modes, and reduced lifespan due to fatigue from repeated beam deformation, contact wear and stiction. Here, we develop an electrostatic in-plane actuator leveraging structural superlubric sliding interfaces, characterized by zero wear, ultralow friction, and no fixed anchor. The actuator features a micro-scale graphite flake in structural superlubric contact with silicon dioxide tracks, reducing friction from edge defects. Using the charge injection method, the structural superlubric actuator not only achieves a maximum relative actuation stroke of 82.3% of the flake size by applying voltage to buried electrodes—3.4 times larger than previously reported, but also enables controllable reciprocating actuation by adjusting the form of the bias voltage. Additionally, no visible wear was observed at the structural superlubric interface after over 10,000 sliding cycles, indicating robust reliability. Our work presents a design concept for micro actuators with high performance and durability, potentially guiding the development of many structural superlubric micro-devices.</p>","PeriodicalId":19066,"journal":{"name":"Nature Communications","volume":"19 1","pages":""},"PeriodicalIF":15.7000,"publicationDate":"2025-01-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Electrostatic in-plane structural superlubric actuator\",\"authors\":\"Xuanyu Huang, Xiaojian Xiang, Chuang Li, Jinhui Nie, Yifan Shao, Zhiping Xu, Quanshui Zheng\",\"doi\":\"10.1038/s41467-024-55078-0\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Micro actuators are widely used in NEMS/MEMS for control and sensing. However, most are designed with suspended beams anchored at fixed points, causing two main issues: restricted actuated stroke and movement modes, and reduced lifespan due to fatigue from repeated beam deformation, contact wear and stiction. Here, we develop an electrostatic in-plane actuator leveraging structural superlubric sliding interfaces, characterized by zero wear, ultralow friction, and no fixed anchor. The actuator features a micro-scale graphite flake in structural superlubric contact with silicon dioxide tracks, reducing friction from edge defects. Using the charge injection method, the structural superlubric actuator not only achieves a maximum relative actuation stroke of 82.3% of the flake size by applying voltage to buried electrodes—3.4 times larger than previously reported, but also enables controllable reciprocating actuation by adjusting the form of the bias voltage. Additionally, no visible wear was observed at the structural superlubric interface after over 10,000 sliding cycles, indicating robust reliability. Our work presents a design concept for micro actuators with high performance and durability, potentially guiding the development of many structural superlubric micro-devices.</p>\",\"PeriodicalId\":19066,\"journal\":{\"name\":\"Nature Communications\",\"volume\":\"19 1\",\"pages\":\"\"},\"PeriodicalIF\":15.7000,\"publicationDate\":\"2025-01-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Nature Communications\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://doi.org/10.1038/s41467-024-55078-0\",\"RegionNum\":1,\"RegionCategory\":\"综合性期刊\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MULTIDISCIPLINARY SCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Communications","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1038/s41467-024-55078-0","RegionNum":1,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
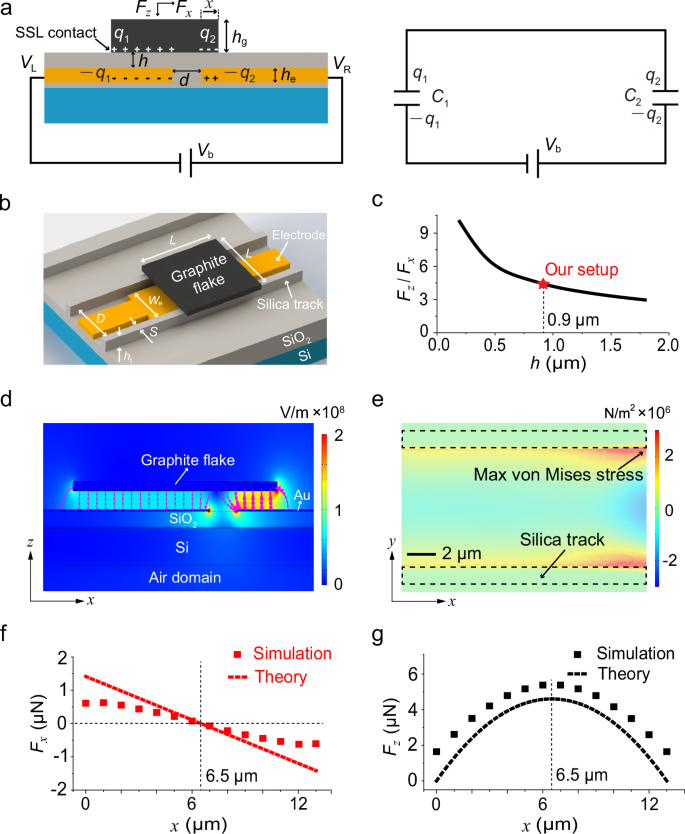
Micro actuators are widely used in NEMS/MEMS for control and sensing. However, most are designed with suspended beams anchored at fixed points, causing two main issues: restricted actuated stroke and movement modes, and reduced lifespan due to fatigue from repeated beam deformation, contact wear and stiction. Here, we develop an electrostatic in-plane actuator leveraging structural superlubric sliding interfaces, characterized by zero wear, ultralow friction, and no fixed anchor. The actuator features a micro-scale graphite flake in structural superlubric contact with silicon dioxide tracks, reducing friction from edge defects. Using the charge injection method, the structural superlubric actuator not only achieves a maximum relative actuation stroke of 82.3% of the flake size by applying voltage to buried electrodes—3.4 times larger than previously reported, but also enables controllable reciprocating actuation by adjusting the form of the bias voltage. Additionally, no visible wear was observed at the structural superlubric interface after over 10,000 sliding cycles, indicating robust reliability. Our work presents a design concept for micro actuators with high performance and durability, potentially guiding the development of many structural superlubric micro-devices.
期刊介绍:
Nature Communications, an open-access journal, publishes high-quality research spanning all areas of the natural sciences. Papers featured in the journal showcase significant advances relevant to specialists in each respective field. With a 2-year impact factor of 16.6 (2022) and a median time of 8 days from submission to the first editorial decision, Nature Communications is committed to rapid dissemination of research findings. As a multidisciplinary journal, it welcomes contributions from biological, health, physical, chemical, Earth, social, mathematical, applied, and engineering sciences, aiming to highlight important breakthroughs within each domain.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:



