{"title":"边缘引导特征融合网络用于RGB-T显著目标检测。","authors":"Yuanlin Chen, Zengbao Sun, Cheng Yan, Ming Zhao","doi":"10.3389/fnbot.2024.1489658","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>RGB-T Salient Object Detection (SOD) aims to accurately segment salient regions in both visible light and thermal infrared images. However, many existing methods overlook the critical complementarity between these modalities, which can enhance detection accuracy.</p><p><strong>Methods: </strong>We propose the Edge-Guided Feature Fusion Network (EGFF-Net), which consists of cross-modal feature extraction, edge-guided feature fusion, and salience map prediction. Firstly, the cross-modal feature extraction module captures and aggregates united and intersecting information in each local region of RGB and thermal images. Then, the edge-guided feature fusion module enhances the edge features of salient regions, considering that edge information is very helpful in refining significant area details. Moreover, a layer-by-layer decoding structure integrates multi-level features and generates the prediction of salience maps.</p><p><strong>Results: </strong>We conduct extensive experiments on three benchmark datasets and compare EGFF-Net with state-of-the-art methods. Our approach achieves superior performance, demonstrating the effectiveness of the proposed modules in improving both detection accuracy and boundary refinement.</p><p><strong>Discussion: </strong>The results highlight the importance of integrating cross-modal information and edge-guided fusion in RGB-T SOD. Our method outperforms existing techniques and provides a robust framework for future developments in multi-modal saliency detection.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"18 ","pages":"1489658"},"PeriodicalIF":2.8000,"publicationDate":"2024-12-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11685216/pdf/","citationCount":"0","resultStr":"{\"title\":\"Edge-guided feature fusion network for RGB-T salient object detection.\",\"authors\":\"Yuanlin Chen, Zengbao Sun, Cheng Yan, Ming Zhao\",\"doi\":\"10.3389/fnbot.2024.1489658\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>RGB-T Salient Object Detection (SOD) aims to accurately segment salient regions in both visible light and thermal infrared images. However, many existing methods overlook the critical complementarity between these modalities, which can enhance detection accuracy.</p><p><strong>Methods: </strong>We propose the Edge-Guided Feature Fusion Network (EGFF-Net), which consists of cross-modal feature extraction, edge-guided feature fusion, and salience map prediction. Firstly, the cross-modal feature extraction module captures and aggregates united and intersecting information in each local region of RGB and thermal images. Then, the edge-guided feature fusion module enhances the edge features of salient regions, considering that edge information is very helpful in refining significant area details. Moreover, a layer-by-layer decoding structure integrates multi-level features and generates the prediction of salience maps.</p><p><strong>Results: </strong>We conduct extensive experiments on three benchmark datasets and compare EGFF-Net with state-of-the-art methods. Our approach achieves superior performance, demonstrating the effectiveness of the proposed modules in improving both detection accuracy and boundary refinement.</p><p><strong>Discussion: </strong>The results highlight the importance of integrating cross-modal information and edge-guided fusion in RGB-T SOD. Our method outperforms existing techniques and provides a robust framework for future developments in multi-modal saliency detection.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"18 \",\"pages\":\"1489658\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2024-12-17\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11685216/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2024.1489658\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2024.1489658","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Edge-guided feature fusion network for RGB-T salient object detection.
Introduction: RGB-T Salient Object Detection (SOD) aims to accurately segment salient regions in both visible light and thermal infrared images. However, many existing methods overlook the critical complementarity between these modalities, which can enhance detection accuracy.
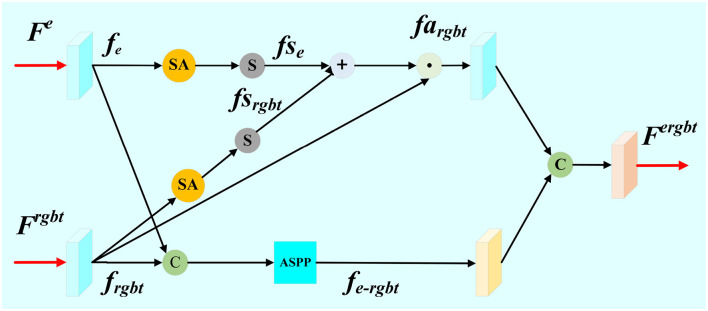
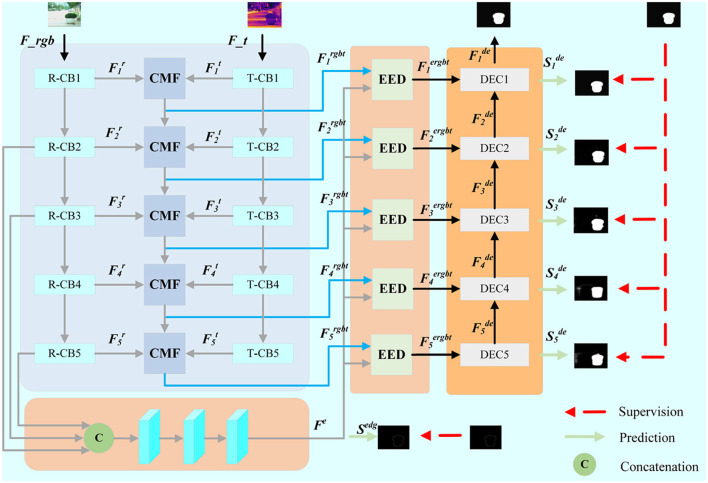
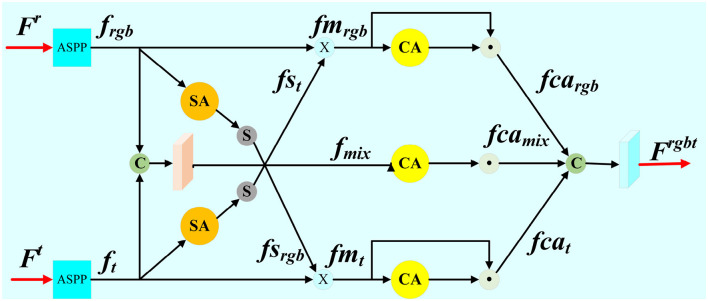
Methods: We propose the Edge-Guided Feature Fusion Network (EGFF-Net), which consists of cross-modal feature extraction, edge-guided feature fusion, and salience map prediction. Firstly, the cross-modal feature extraction module captures and aggregates united and intersecting information in each local region of RGB and thermal images. Then, the edge-guided feature fusion module enhances the edge features of salient regions, considering that edge information is very helpful in refining significant area details. Moreover, a layer-by-layer decoding structure integrates multi-level features and generates the prediction of salience maps.
Results: We conduct extensive experiments on three benchmark datasets and compare EGFF-Net with state-of-the-art methods. Our approach achieves superior performance, demonstrating the effectiveness of the proposed modules in improving both detection accuracy and boundary refinement.
Discussion: The results highlight the importance of integrating cross-modal information and edge-guided fusion in RGB-T SOD. Our method outperforms existing techniques and provides a robust framework for future developments in multi-modal saliency detection.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


