具有高容量和运动稳定性的软机器人磁双稳态球形驱动器
IF 8.2
2区 材料科学
Q1 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
摘要
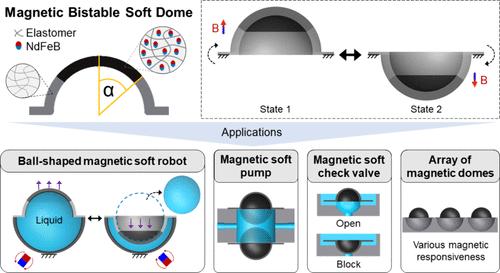
磁响应软执行器由于其快速响应和不受约束的操作,在软机器人中具有重要的前景。然而,由于其固有的灵活性和高度的自由度,控制其变形提出了挑战。在这里,我们提出了一个磁驱动的双稳态圆顶形软驱动器,通过将其限制在两个不同的状态来简化变形。执行器通过切换外部磁场的方向来实现受控状态转换。研究了球形软作动器的设计策略和磁化方式。此外,我们还分析了它们对状态转换的影响。双稳态圆顶在变形过程中可靠而平稳地经历了显著的体积变化,其自然曲率使其适合于涉及滚动运动的任务。我们展示了驱动器在各种应用中的有效性,包括用于控制驱动的双稳态圆顶阵列,带有集成止回阀的磁驱动脉冲泵,以及能够有效滚动运动和流体操作的球形双稳态机器人。我们的设计显著提高了双稳态软机器人系统的多功能性和效率,突出了它们在液体收集和释放等任务中的潜力。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Magnetic Bistable Dome Actuators for Soft Robotics with High Volume Capacity and Motion Stability
Magneto-responsive soft actuators hold significant promise in soft robotics due to their rapid responsiveness and untethered operation. However, controlling their deformations presents challenges because of their inherent flexibility and high degrees of freedom. Here, we present a magnetically driven bistable dome-shaped soft actuator that simplifies deformation by limiting it to two distinct states. The actuator achieves controlled state transitions by switching the orientation of external magnetic fields. We investigate the design strategy and magnetization styles of the dome-shaped soft actuator. Additionally, we analyze their effects on state transitions. The bistable dome undergoes significant volume changes reliably and smoothly during deformation, and its natural curvature makes it suitable for tasks involving rolling motion. We demonstrate the actuator’s effectiveness in various applications, including an array of bistable domes for controlled actuation, a magnetically driven pulse pump with integrated check valves, and a ball-shaped bistable robot capable of efficient rolling locomotion and fluid manipulation. Our design significantly enhances the versatility and efficiency of bistable soft robotic systems, highlighting their potential for tasks such as liquid collection and release.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

ACS Applied Materials & Interfaces
工程技术-材料科学:综合
CiteScore
16.00
自引率
6.30%
发文量
4978
审稿时长
1.8 months
期刊介绍:
ACS Applied Materials & Interfaces is a leading interdisciplinary journal that brings together chemists, engineers, physicists, and biologists to explore the development and utilization of newly-discovered materials and interfacial processes for specific applications. Our journal has experienced remarkable growth since its establishment in 2009, both in terms of the number of articles published and the impact of the research showcased. We are proud to foster a truly global community, with the majority of published articles originating from outside the United States, reflecting the rapid growth of applied research worldwide.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


