快速地对空转换与鸟类灵感的多功能腿
IF 48.5
1区 综合性期刊
Q1 MULTIDISCIPLINARY SCIENCES
引用次数: 0
摘要
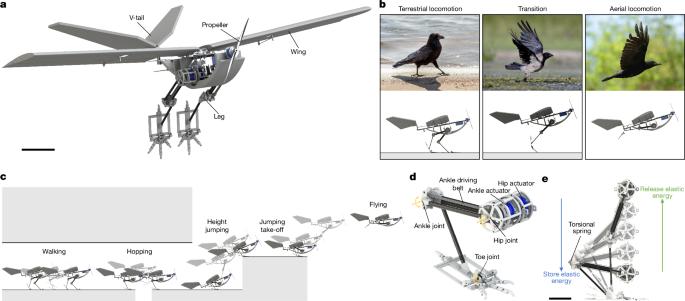
大多数鸟类可以在空中和陆地环境之间无缝导航。前肢进化成翅膀主要是为了飞行,而后肢则具有多种功能,如行走、跳跃和跳跃,以及跳跃起飞以过渡到飞行。这些能力激发了工程师们在空中机器人中瞄准类似的多模态,扩大它们在不同环境中的应用范围。然而,在复制具有不同运动学和推进特性的步态(如行走和跳跃)的多模式运动,同时保持飞行所需的轻质量方面仍然存在挑战。这种在机械复杂性和通用性之间的权衡限制了大多数现有的空中机器人只有一种额外的运动模式。在这里,我们克服了复杂性和多功能性的权衡与乌鸦(机器人鸟类的多环境启发车辆),它使用其鸟类启发的多功能腿快速跳跃进入飞行,在地面上行走,跳过障碍物和间隙类似于鸟类的多模式运动。我们表明,跳跃起飞对初始飞行起飞速度6,7,8,9的贡献很大,而且,值得注意的是,它比不跳跃起飞更节能。我们的分析表明,在适应不同运动策略的鸟类中,腿和身体之间的质量分布存在重要的权衡,而在具有多模式步态需求的陆生鸟类中,腿部质量的投资更大。多功能机器人腿通过自主起飞和多模式步态扩展了传统固定翼飞机在复杂地形上部署的机会。本文章由计算机程序翻译,如有差异,请以英文原文为准。

Fast ground-to-air transition with avian-inspired multifunctional legs
Most birds can navigate seamlessly between aerial and terrestrial environments. Whereas the forelimbs evolved into wings primarily for flight, the hindlimbs serve diverse functions such as walking, hopping and leaping, and jumping take-off for transitions into flight1. These capabilities have inspired engineers to aim for similar multimodality in aerial robots, expanding their range of applications across diverse environments. However, challenges remain in reproducing multimodal locomotion, across gaits with distinct kinematics and propulsive characteristics, such as walking and jumping, while preserving lightweight mass for flight. This trade-off between mechanical complexity and versatility2 limits most existing aerial robots to only one additional locomotor mode3–5. Here we overcome the complexity–versatility trade-off with RAVEN (Robotic Avian-inspired Vehicle for multiple ENvironments), which uses its bird-inspired multifunctional legs to jump rapidly into flight, walk on the ground, and hop over obstacles and gaps similar to the multimodal locomotion of birds. We show that jumping for take-off contributes substantially to the initial flight take-off speed6–9 and, remarkably, that it is more energy efficient than taking off without the jump. Our analysis suggests an important trade-off in mass distribution between legs and body among birds adapted for different locomotor strategies, with greater investment in leg mass among terrestrial birds with multimodal gait demands. Multifunctional robot legs expand the opportunities to deploy traditional fixed-wing aircraft in complex terrains through autonomous take-offs and multimodal gaits. A bird-inspired robot that can jump into flight, walk on the ground and hop over obstacles shows that jumping for take-off is more energy efficient than taking off without the jump.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Nature
综合性期刊-综合性期刊
CiteScore
90.00
自引率
1.20%
发文量
3652
审稿时长
3 months
期刊介绍:
Nature is a prestigious international journal that publishes peer-reviewed research in various scientific and technological fields. The selection of articles is based on criteria such as originality, importance, interdisciplinary relevance, timeliness, accessibility, elegance, and surprising conclusions. In addition to showcasing significant scientific advances, Nature delivers rapid, authoritative, insightful news, and interpretation of current and upcoming trends impacting science, scientists, and the broader public. The journal serves a dual purpose: firstly, to promptly share noteworthy scientific advances and foster discussions among scientists, and secondly, to ensure the swift dissemination of scientific results globally, emphasizing their significance for knowledge, culture, and daily life.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


