Quentin Neuville, Taylor Frantz, Frederick Van Gestel, Bart Janssen, Jef Vandemeulebroucke, Johnny Duerinck, Thierry Scheerlinck
{"title":"验证基于增强现实的功能性方法,以确定和渲染全髋关节置换术中的髋关节旋转中心。","authors":"Quentin Neuville, Taylor Frantz, Frederick Van Gestel, Bart Janssen, Jef Vandemeulebroucke, Johnny Duerinck, Thierry Scheerlinck","doi":"10.1002/rcs.70011","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>We present a method to determine and visualise the functional centre of rotation (FCOR) of the hip during total hip arthroplasty using an augmented reality head mounted display (AR-HMD).</p>\n </section>\n \n <section>\n \n <h3> Methods</h3>\n \n <p>We developed software allowing a HoloLens to provide inside-out infrared tracking of markers affixed to cadaver femurs and 3D printed acetabuli. Two observers rotated 20 cadaver femurs twice in a matching cup, producing 80 measurements. The FCOR of the acetabulum and femoral head was determined based on the point cloud generated from the displacement of the femoral trackers to the acetabular tracker.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>Compared to the ground truth, the FCOR resulted in an absolute error of 2.9 ± 1.4 mm for the acetabulum and 2.9 ± 1.2 mm for the femur, with 95th percentiles below 5.6 and 4.7 mm.</p>\n </section>\n \n <section>\n \n <h3> Conclusion</h3>\n \n <p>The proposed AR-HMD system offers an accurate and reproducible way to determine the femoral and acetabular FCOR in an experimental setting.</p>\n </section>\n </div>","PeriodicalId":50311,"journal":{"name":"International Journal of Medical Robotics and Computer Assisted Surgery","volume":"20 6","pages":""},"PeriodicalIF":2.1000,"publicationDate":"2024-11-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.70011","citationCount":"0","resultStr":"{\"title\":\"Validation of an Augmented Reality Based Functional Method to Determine and Render the Hip Rotation Centre During Total Hip Arthroplasty\",\"authors\":\"Quentin Neuville, Taylor Frantz, Frederick Van Gestel, Bart Janssen, Jef Vandemeulebroucke, Johnny Duerinck, Thierry Scheerlinck\",\"doi\":\"10.1002/rcs.70011\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n \\n \\n <section>\\n \\n <h3> Background</h3>\\n \\n <p>We present a method to determine and visualise the functional centre of rotation (FCOR) of the hip during total hip arthroplasty using an augmented reality head mounted display (AR-HMD).</p>\\n </section>\\n \\n <section>\\n \\n <h3> Methods</h3>\\n \\n <p>We developed software allowing a HoloLens to provide inside-out infrared tracking of markers affixed to cadaver femurs and 3D printed acetabuli. Two observers rotated 20 cadaver femurs twice in a matching cup, producing 80 measurements. The FCOR of the acetabulum and femoral head was determined based on the point cloud generated from the displacement of the femoral trackers to the acetabular tracker.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Results</h3>\\n \\n <p>Compared to the ground truth, the FCOR resulted in an absolute error of 2.9 ± 1.4 mm for the acetabulum and 2.9 ± 1.2 mm for the femur, with 95th percentiles below 5.6 and 4.7 mm.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Conclusion</h3>\\n \\n <p>The proposed AR-HMD system offers an accurate and reproducible way to determine the femoral and acetabular FCOR in an experimental setting.</p>\\n </section>\\n </div>\",\"PeriodicalId\":50311,\"journal\":{\"name\":\"International Journal of Medical Robotics and Computer Assisted Surgery\",\"volume\":\"20 6\",\"pages\":\"\"},\"PeriodicalIF\":2.1000,\"publicationDate\":\"2024-11-22\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.70011\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Medical Robotics and Computer Assisted Surgery\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/rcs.70011\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"SURGERY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Medical Robotics and Computer Assisted Surgery","FirstCategoryId":"3","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rcs.70011","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
Validation of an Augmented Reality Based Functional Method to Determine and Render the Hip Rotation Centre During Total Hip Arthroplasty
Background
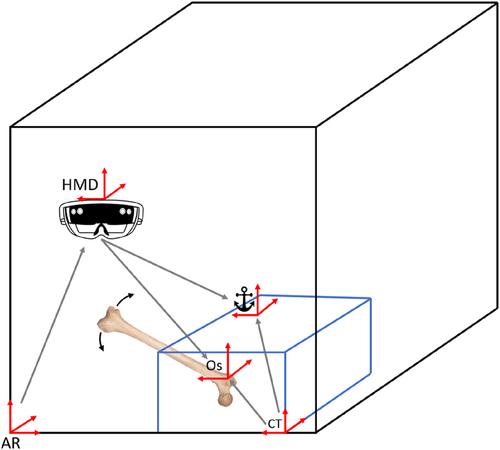
We present a method to determine and visualise the functional centre of rotation (FCOR) of the hip during total hip arthroplasty using an augmented reality head mounted display (AR-HMD).
Methods
We developed software allowing a HoloLens to provide inside-out infrared tracking of markers affixed to cadaver femurs and 3D printed acetabuli. Two observers rotated 20 cadaver femurs twice in a matching cup, producing 80 measurements. The FCOR of the acetabulum and femoral head was determined based on the point cloud generated from the displacement of the femoral trackers to the acetabular tracker.
Results
Compared to the ground truth, the FCOR resulted in an absolute error of 2.9 ± 1.4 mm for the acetabulum and 2.9 ± 1.2 mm for the femur, with 95th percentiles below 5.6 and 4.7 mm.
Conclusion
The proposed AR-HMD system offers an accurate and reproducible way to determine the femoral and acetabular FCOR in an experimental setting.
期刊介绍:
The International Journal of Medical Robotics and Computer Assisted Surgery provides a cross-disciplinary platform for presenting the latest developments in robotics and computer assisted technologies for medical applications. The journal publishes cutting-edge papers and expert reviews, complemented by commentaries, correspondence and conference highlights that stimulate discussion and exchange of ideas. Areas of interest include robotic surgery aids and systems, operative planning tools, medical imaging and visualisation, simulation and navigation, virtual reality, intuitive command and control systems, haptics and sensor technologies. In addition to research and surgical planning studies, the journal welcomes papers detailing clinical trials and applications of computer-assisted workflows and robotic systems in neurosurgery, urology, paediatric, orthopaedic, craniofacial, cardiovascular, thoraco-abdominal, musculoskeletal and visceral surgery. Articles providing critical analysis of clinical trials, assessment of the benefits and risks of the application of these technologies, commenting on ease of use, or addressing surgical education and training issues are also encouraged. The journal aims to foster a community that encompasses medical practitioners, researchers, and engineers and computer scientists developing robotic systems and computational tools in academic and commercial environments, with the intention of promoting and developing these exciting areas of medical technology.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


