气动肌肉推杆中 CPG 仿生反射的抗干扰控制
IF 4.6
2区 综合性期刊
Q1 MULTIDISCIPLINARY SCIENCES
引用次数: 0
摘要
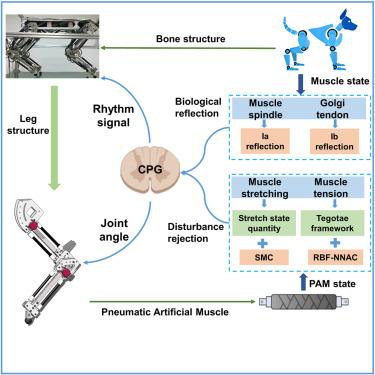
针对气动肌肉驱动机器人的关节控制问题,本研究旨在设计一种仿生反射机制,以增强机器人对各种干扰的适应能力。在生物反射机制的基础上,我们开发了基于中央模式发生器(CPG)的主轴反射和深腱反射控制系统,以分别减轻对髋关节的突然冲击和对膝关节的持续阻挡力。主轴反射控制器结合了滑动模式控制的快速响应特性,可有效减少髋关节在冲击干扰下的轨迹偏差。深筋腱反射控制器整合了 RBF 神经网络自适应控制和 Tegotae 框架,以抑制膝关节的过度张力,增强系统对阻挡力干扰的适应性。实验结果证实,这两种反射机制显著增强了气动肌肉驱动机器人在运动中的鲁棒性和灵活性。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Anti-disturbance control of CPG bionic reflection in pneumatic muscle actuator
Addressing the joint control problem of pneumatic muscle-driven robots, this study aims to design a bionic reflex mechanism to enhance the robots’ adaptive capacity to various disturbances. Based on the biological reflex mechanism, we developed a spindle reflex and deep tendon reflex control system based on CPG (central pattern generator) to mitigate the sudden impact on the hip joint and the continuous blocking force on the knee joint, respectively. The spindle reflex controller incorporates the fast response of sliding mode control to effectively minimize the trajectory deviation of the hip joint under impact disturbances. The deep tendon reflex controller integrates RBF neural network adaptive control and the Tegotae framework to suppress excessive tension in the knee joint and augment the system’s adaptability to the blocking force disturbances. The experimental results confirm that the two reflex mechanisms significantly enhance the robustness and flexibility of the pneumatic muscle-driven robot in motion.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
iScience
Multidisciplinary-Multidisciplinary
CiteScore
7.20
自引率
1.70%
发文量
1972
审稿时长
6 weeks
期刊介绍:
Science has many big remaining questions. To address them, we will need to work collaboratively and across disciplines. The goal of iScience is to help fuel that type of interdisciplinary thinking. iScience is a new open-access journal from Cell Press that provides a platform for original research in the life, physical, and earth sciences. The primary criterion for publication in iScience is a significant contribution to a relevant field combined with robust results and underlying methodology. The advances appearing in iScience include both fundamental and applied investigations across this interdisciplinary range of topic areas. To support transparency in scientific investigation, we are happy to consider replication studies and papers that describe negative results.
We know you want your work to be published quickly and to be widely visible within your community and beyond. With the strong international reputation of Cell Press behind it, publication in iScience will help your work garner the attention and recognition it merits. Like all Cell Press journals, iScience prioritizes rapid publication. Our editorial team pays special attention to high-quality author service and to efficient, clear-cut decisions based on the information available within the manuscript. iScience taps into the expertise across Cell Press journals and selected partners to inform our editorial decisions and help publish your science in a timely and seamless way.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


