RGB-LiDAR 传感器融合用于自主挖掘应用中的粉尘去滤波
IF 9.6
1区 工程技术
Q1 CONSTRUCTION & BUILDING TECHNOLOGY
引用次数: 0
摘要
自主挖掘的多尘环境会影响车载传感器的性能。具体来说,如果处理不当,空气中的尘埃云会被感知为固体物体,从而导致不合理的移动,危及安全。本文开发了一种光探测与测距(LiDAR)和红绿蓝(RGB)图像传感器融合模型,用于过滤空气中的尘埃粒子。所提出的方法在单独的卷积神经网络(CNN)模型中处理 RGB 和 LiDAR 数据,并在后期融合模型中合并预测结果,以提高实时性。测试表明,当尘埃云距离传感器 3 米左右时,所提出的融合模型的 F1 分数比仅使用 LiDAR 的 CNN 模型和动态半径离群值去除与低强度离群值去除(LIOR-DROR)配对模型高出至少 2.64%。本文章由计算机程序翻译,如有差异,请以英文原文为准。
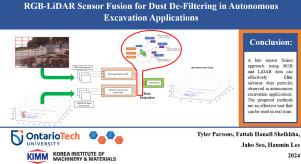
RGB-LiDAR sensor fusion for dust de-filtering in autonomous excavation applications
The dusty environments of autonomous excavation can affect the performance of the sensors onboard the vehicle. Specifically, airborne dust clouds can be perceived as solid objects if not addressed appropriately, which can lead to irrational movements that risk safety. In this article, a light detection and ranging (LiDAR) and red-green-blue (RGB) image sensor fusion model was developed to filter airborne dust particles. The proposed approach processes the RGB and LiDAR data in separate convolutional neural network (CNN) models and combines the predictions in a late fusion model for enhanced real-time performance. Testing shows that the proposed fusion model has an F1 score at least 2.64% higher than a LiDAR only CNN model and a dynamic radius outlier removal paired with low-intensity outlier removal (LIOR-DROR) when dust clouds are around 3 m from the sensors.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Automation in Construction
工程技术-工程:土木
CiteScore
19.20
自引率
16.50%
发文量
563
审稿时长
8.5 months
期刊介绍:
Automation in Construction is an international journal that focuses on publishing original research papers related to the use of Information Technologies in various aspects of the construction industry. The journal covers topics such as design, engineering, construction technologies, and the maintenance and management of constructed facilities.
The scope of Automation in Construction is extensive and covers all stages of the construction life cycle. This includes initial planning and design, construction of the facility, operation and maintenance, as well as the eventual dismantling and recycling of buildings and engineering structures.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


