宽度可变的折纸轮式机器人,增强了沙地行走的多功能性
IF 5.7
1区 工程技术
Q1 ENGINEERING, CIVIL
引用次数: 0
摘要
受折纸启发的机器人具有多种优点,包括重量轻、组装要求低、可变形性强等,因此备受关注。然而,现有的折纸启发机器人通常功能有限,开发功能丰富的机器人非常具有挑战性。在此,我们报告了一种折纸轮式机器人(OriWheelBot),它在沙地行走时具有超强的机动性,而且宽度可以改变。使用三浦折纸制作的折纸轮子允许 OriWheelBot 在遇到障碍物时改变轮子宽度。我们推导出折纸轮的可变宽度和直径分析模型,并假设其为刚性折叠,这一点已通过测试得到证实。此外,我们还开发了一种增强型机器人,被称为 iOriWheelBot,能够自主确定障碍物的宽度。根据障碍物之间通道的宽度,将执行三种操作:直接通过、变宽通过和直接返回。与我们确定的两种运动机制中的另一种--挖沙相比,推沙更适合在沙地上行走。我们已对沙地行走的许多方面进行了有条不紊的研究,包括承载负荷、在斜坡上行走、爬坡,以及在沙坑、小石头和沙坑中穿行。OriWheelBot可以爬上17度的沙坡,其宽度变化幅度为40%,在平坦的沙地上的负重率为66.7%。灾区救援行动和行星地下勘探都将受益于 OriWheelBot。本文章由计算机程序翻译,如有差异,请以英文原文为准。
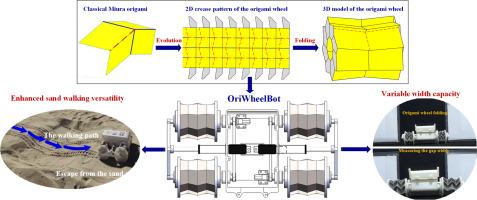
An origami-wheeled robot with variable width and enhanced sand walking versatility
Robots inspired by origami that offer several benefits, including being lightweight, requiring less assembly, and possessing remarkable deformability, have drawn a lot of interest. However, the existing origami-inspired robots are usually of limited functionalities and developing feature-rich robots is very challenging. Here, we report an origami-wheeled robot (OriWheelBot) with exceptional mobility for sand walking and a changing width. Origami wheels created using Miura origami permit the OriWheelBot to alter wheel width over obstacles. We derive the variable-width and diameter analytical models of the origami wheel, assuming rigid-folding, which has been confirmed by testing. An enhanced variant, dubbed iOriWheelBot, is additionally being developed to autonomously determine the obstacle's breadth. Based on the width of the channel between the barriers, three actions will be executed: direct pass, variable width pass, and direct return. Sand-pushing is more suitable for walking on the sand than sand-digging, which is the other of the two motion mechanisms that we have identified. Many aspects of sand walking, including carrying loads, walking on a slope, climbing a slope, and negotiating sand pits, small rocks, and sand traps, have been methodically investigated. The OriWheelBot can climb a 17-degree sand incline, vary its width by 40 %, and have a loading-carrying ratio of 66.7 % on flat sand. Rescue operations in disaster areas and planetary subsurface exploration can benefit from the OriWheelBot.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
Thin-Walled Structures
工程技术-工程:土木
CiteScore
9.60
自引率
20.30%
发文量
801
审稿时长
66 days
期刊介绍:
Thin-walled structures comprises an important and growing proportion of engineering construction with areas of application becoming increasingly diverse, ranging from aircraft, bridges, ships and oil rigs to storage vessels, industrial buildings and warehouses.
Many factors, including cost and weight economy, new materials and processes and the growth of powerful methods of analysis have contributed to this growth, and led to the need for a journal which concentrates specifically on structures in which problems arise due to the thinness of the walls. This field includes cold– formed sections, plate and shell structures, reinforced plastics structures and aluminium structures, and is of importance in many branches of engineering.
The primary criterion for consideration of papers in Thin–Walled Structures is that they must be concerned with thin–walled structures or the basic problems inherent in thin–walled structures. Provided this criterion is satisfied no restriction is placed on the type of construction, material or field of application. Papers on theory, experiment, design, etc., are published and it is expected that many papers will contain aspects of all three.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


