增强功能的 YOLO 及其在智能装配中的应用
IF 4.3
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
摘要
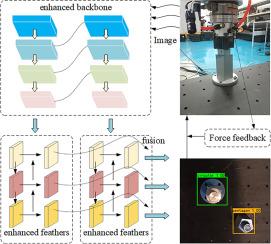
物体检测是智能装配任务中最重要的一环,准确、快速地检测不同目标可以更自动、更高效地完成定位和装配任务。本文提出了一种基于 YOLO 的特征增强物体检测模型。首先,通过 RFP(递归特征金字塔)结构增强特征层的表达能力。为了进一步增强骨干网络输出的特征层,本文提出了 ARSPP(Atrous Residual Spatial Pyramid Pooling),通过使用不同大小的扩张卷积和残差连接,提高了模型对多尺度目标的识别性能。最后,通过注意力机制对连续的金字塔特征进行融合和增强,并将结果用于下一次递归或预测输出的输入。本文提出的模型有效地提高了 YOLO 的检测精度,在 PASCAL VOC 数据集中的 MAP 提高了 3%。该模型的有效性和准确性在机器人智能装配识别任务中得到了验证。本文章由计算机程序翻译,如有差异,请以英文原文为准。
YOLO with feature enhancement and its application in intelligent assembly
Object detection is the most important part in intelligent assembly tasks, accurate and fast detection for different targets can complete positioning and assembly tasks more automatically and efficiently. In this paper, a feature enhancement object detection model based on YOLO is proposed. Firstly, the expression ability of feature layer is enhanced through RFP (Recursive Feature Pyramid) structure. The ARSPP (Atrous Residual Spatial Pyramid Pooling) is proposed to have a further enhancement for the feature layers output by the backbone network, it improves the recognition performance for multi-scale targets of model by using different size of dilated convolution and residual connection. Finally, the contiguous pyramid features are fused and enhanced through the attention mechanism, the results are used for the input of next recursive or predictive output. The model proposed in this paper effectively improves the detection accuracy of YOLO, it has 3% MAP improvement in PASCAL VOC dataset. The validity and accuracy of the model are verified in the robot intelligent assembly recognition task.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Robotics and Autonomous Systems
工程技术-机器人学
CiteScore
9.00
自引率
7.00%
发文量
164
审稿时长
4.5 months
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


