Sheng Yu, Jiangkun Sun, Yongmeng Zhang, Xiang Xi, Kun Lu, Yan Shi, Dingbang Xiao, Xuezhong Wu
{"title":"全角微壳共振陀螺仪静电驱动增益非线性实时校正。","authors":"Sheng Yu, Jiangkun Sun, Yongmeng Zhang, Xiang Xi, Kun Lu, Yan Shi, Dingbang Xiao, Xuezhong Wu","doi":"10.1038/s41378-024-00818-x","DOIUrl":null,"url":null,"abstract":"<p><p>MEMS gyroscopes are well known for their outstanding advantages in Cost Size Weight and Power (CSWaP), which have inspired great research attention in recent years. A higher signal-to-noise ratio (SNR) for MEMS gyroscopes operating at larger vibrating amplitudes provides improved measuring resolution and ARW performance. However, the increment of amplitude causes strong nonlinear effects of MEMS gyroscopes due to their micron size, which has negative influences on the performance. This paper carries out detailed research on a general nonlinear mechanism on the sensors using parallel-plate capacitive transducers, which is called the gain nonlinearity in electrostatic actuation. The theoretical model established in this paper demonstrates the actuation gain nonlinearity causes the control-force coupling and brings extra angle-dependent bias with the 4<sup>th</sup> component for the whole-angle gyroscopes, which are verified by the experiments carried out on a micro-shell resonator gyroscope (MSRG). Furthermore, a real-time correction method is proposed to restore a linear response of the electrostatic actuation, which is realized by the gain modification with an online parameter estimation based on the harmonic-component relationship of capacitive detection. This real-time correction method could reduce the 4<sup>th</sup> component of the angle-dependent bias by over 95% from 0.003°/s to less than 0.0001°/s even under different temperatures. After the correction of actuation gain nonlinearity, the bias instability (BI) of whole-angle MSRG is improved by about 3.5 times from 0.101°/h to 0.029°/h and the scale factor nonlinearity (SFN) is reduced by almost one order of magnitude from 2.02 ppm to 0.21 ppm.</p>","PeriodicalId":18560,"journal":{"name":"Microsystems & Nanoengineering","volume":"10 1","pages":"164"},"PeriodicalIF":9.9000,"publicationDate":"2024-11-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11535526/pdf/","citationCount":"0","resultStr":"{\"title\":\"Real-time correction of gain nonlinearity in electrostatic actuation for whole-angle micro-shell resonator gyroscope.\",\"authors\":\"Sheng Yu, Jiangkun Sun, Yongmeng Zhang, Xiang Xi, Kun Lu, Yan Shi, Dingbang Xiao, Xuezhong Wu\",\"doi\":\"10.1038/s41378-024-00818-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>MEMS gyroscopes are well known for their outstanding advantages in Cost Size Weight and Power (CSWaP), which have inspired great research attention in recent years. A higher signal-to-noise ratio (SNR) for MEMS gyroscopes operating at larger vibrating amplitudes provides improved measuring resolution and ARW performance. However, the increment of amplitude causes strong nonlinear effects of MEMS gyroscopes due to their micron size, which has negative influences on the performance. This paper carries out detailed research on a general nonlinear mechanism on the sensors using parallel-plate capacitive transducers, which is called the gain nonlinearity in electrostatic actuation. The theoretical model established in this paper demonstrates the actuation gain nonlinearity causes the control-force coupling and brings extra angle-dependent bias with the 4<sup>th</sup> component for the whole-angle gyroscopes, which are verified by the experiments carried out on a micro-shell resonator gyroscope (MSRG). Furthermore, a real-time correction method is proposed to restore a linear response of the electrostatic actuation, which is realized by the gain modification with an online parameter estimation based on the harmonic-component relationship of capacitive detection. This real-time correction method could reduce the 4<sup>th</sup> component of the angle-dependent bias by over 95% from 0.003°/s to less than 0.0001°/s even under different temperatures. After the correction of actuation gain nonlinearity, the bias instability (BI) of whole-angle MSRG is improved by about 3.5 times from 0.101°/h to 0.029°/h and the scale factor nonlinearity (SFN) is reduced by almost one order of magnitude from 2.02 ppm to 0.21 ppm.</p>\",\"PeriodicalId\":18560,\"journal\":{\"name\":\"Microsystems & Nanoengineering\",\"volume\":\"10 1\",\"pages\":\"164\"},\"PeriodicalIF\":9.9000,\"publicationDate\":\"2024-11-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11535526/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Microsystems & Nanoengineering\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1038/s41378-024-00818-x\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"INSTRUMENTS & INSTRUMENTATION\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Microsystems & Nanoengineering","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1038/s41378-024-00818-x","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"INSTRUMENTS & INSTRUMENTATION","Score":null,"Total":0}
Real-time correction of gain nonlinearity in electrostatic actuation for whole-angle micro-shell resonator gyroscope.
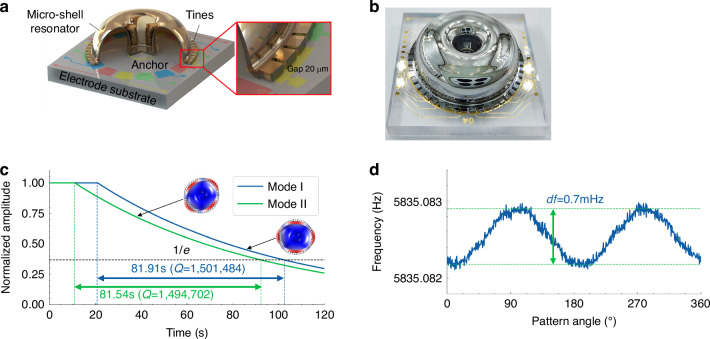
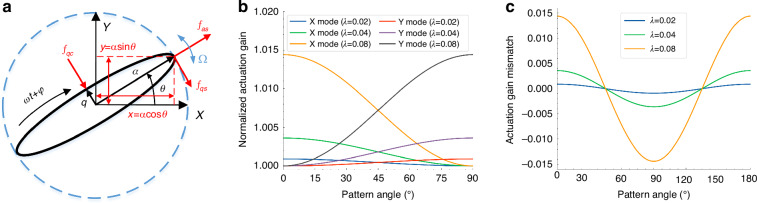
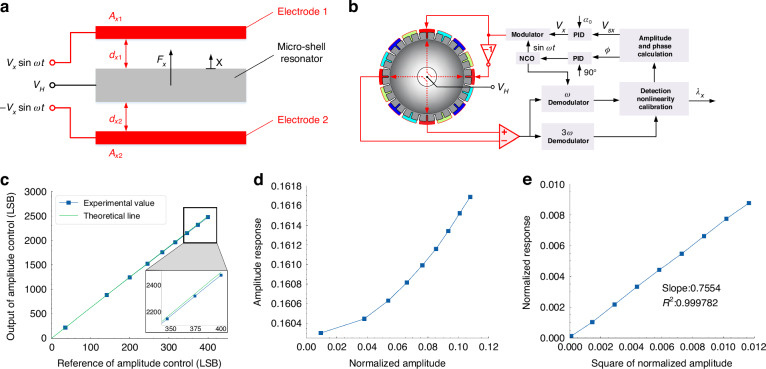
MEMS gyroscopes are well known for their outstanding advantages in Cost Size Weight and Power (CSWaP), which have inspired great research attention in recent years. A higher signal-to-noise ratio (SNR) for MEMS gyroscopes operating at larger vibrating amplitudes provides improved measuring resolution and ARW performance. However, the increment of amplitude causes strong nonlinear effects of MEMS gyroscopes due to their micron size, which has negative influences on the performance. This paper carries out detailed research on a general nonlinear mechanism on the sensors using parallel-plate capacitive transducers, which is called the gain nonlinearity in electrostatic actuation. The theoretical model established in this paper demonstrates the actuation gain nonlinearity causes the control-force coupling and brings extra angle-dependent bias with the 4th component for the whole-angle gyroscopes, which are verified by the experiments carried out on a micro-shell resonator gyroscope (MSRG). Furthermore, a real-time correction method is proposed to restore a linear response of the electrostatic actuation, which is realized by the gain modification with an online parameter estimation based on the harmonic-component relationship of capacitive detection. This real-time correction method could reduce the 4th component of the angle-dependent bias by over 95% from 0.003°/s to less than 0.0001°/s even under different temperatures. After the correction of actuation gain nonlinearity, the bias instability (BI) of whole-angle MSRG is improved by about 3.5 times from 0.101°/h to 0.029°/h and the scale factor nonlinearity (SFN) is reduced by almost one order of magnitude from 2.02 ppm to 0.21 ppm.
期刊介绍:
Microsystems & Nanoengineering is a comprehensive online journal that focuses on the field of Micro and Nano Electro Mechanical Systems (MEMS and NEMS). It provides a platform for researchers to share their original research findings and review articles in this area. The journal covers a wide range of topics, from fundamental research to practical applications. Published by Springer Nature, in collaboration with the Aerospace Information Research Institute, Chinese Academy of Sciences, and with the support of the State Key Laboratory of Transducer Technology, it is an esteemed publication in the field. As an open access journal, it offers free access to its content, allowing readers from around the world to benefit from the latest developments in MEMS and NEMS.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


