考虑生物物理环境的树篱系统多用途无人机路径规划综合框架
IF 2.5
2区 农林科学
Q1 AGRONOMY
引用次数: 0
摘要
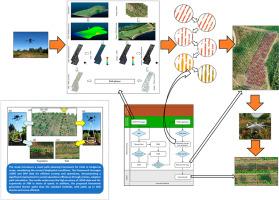
本研究介绍了一种新的精准农业路径规划框架,该框架专为树篱系统设计,结合了尖端技术和数据分析,可在气候变化挑战下加强作物管理。该框架利用无人驾驶飞行器(UAV)或无人机,通过高精度激光雷达(LiDAR)或运动结构(SfM)数据,创建详细的数字田间模型。然后,这些模型将作为路径规划算法的输入,这对引导无人机以最有效的路径进行勘测或喷洒至关重要。其主要特点是能够根据农田的具体条件进行调整,考虑当前的生物物理环境,确保路径与作物行紧密配合,并适应植被变化。这极大地提高了效率,尤其是在行距不规则或植被不均匀的情况下,其路径比传统的几何方法缩短了 40%。该算法的有效性取决于输入数据的质量,推荐使用激光雷达,尽管其处理时间较长,但精度更高。在西班牙的一个葡萄园进行了实地测试,以验证该框架的有效性。建议的框架将无人机技术与精确路由和高质量数据相结合,有可能提高木本作物的可持续和高效管理。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Integrated framework for multipurpose UAV Path Planning in hedgerow systems considering the biophysical environment
This study presents a new path-planning framework for precision agriculture, designed for hedgerow systems, which combines cutting-edge technology and data analysis to enhance crop management in light of climate change challenges. The framework creates detailed digital field models by employing Unmanned Aerial Vehicles (UAVs), or drones, either with high-precision LiDAR or Structure-from-Motion (SfM) data. Then, these models are inputs for the path planning algorithm, crucial for directing drones on the most efficient paths for surveys or spraying. The key feature is its ability to adjust to the specific conditions of agricultural fields, considering the current biophysical environment, ensuring paths are closely aligned with crop rows and adapting to vegetation changes. This leads to significant efficiency improvements, especially in cases of irregular row spacing or heterogeneous vegetation, achieving paths up to 40% shorter than traditional geometry-based methods. The effectiveness of the algorithm relies on the quality of input data, with LiDAR being recommended due to its higher accuracy despite its longer processing time. Field tests were conducted in a vineyard in Spain to validate the effectiveness of the framework. Integrating drone technology with precise routing and high-quality data, the proposed framework can potentially enhance the sustainable and efficient management of woody crops.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
Crop Protection
农林科学-农艺学
CiteScore
6.10
自引率
3.60%
发文量
200
审稿时长
29 days
期刊介绍:
The Editors of Crop Protection especially welcome papers describing an interdisciplinary approach showing how different control strategies can be integrated into practical pest management programs, covering high and low input agricultural systems worldwide. Crop Protection particularly emphasizes the practical aspects of control in the field and for protected crops, and includes work which may lead in the near future to more effective control. The journal does not duplicate the many existing excellent biological science journals, which deal mainly with the more fundamental aspects of plant pathology, applied zoology and weed science. Crop Protection covers all practical aspects of pest, disease and weed control, including the following topics:
-Abiotic damage-
Agronomic control methods-
Assessment of pest and disease damage-
Molecular methods for the detection and assessment of pests and diseases-
Biological control-
Biorational pesticides-
Control of animal pests of world crops-
Control of diseases of crop plants caused by microorganisms-
Control of weeds and integrated management-
Economic considerations-
Effects of plant growth regulators-
Environmental benefits of reduced pesticide use-
Environmental effects of pesticides-
Epidemiology of pests and diseases in relation to control-
GM Crops, and genetic engineering applications-
Importance and control of postharvest crop losses-
Integrated control-
Interrelationships and compatibility among different control strategies-
Invasive species as they relate to implications for crop protection-
Pesticide application methods-
Pest management-
Phytobiomes for pest and disease control-
Resistance management-
Sampling and monitoring schemes for diseases, nematodes, pests and weeds.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


