植保无人机除草剂罐内液体荡漾的数值模拟分析与实验研究
IF 7.7
1区 农林科学
Q1 AGRICULTURE, MULTIDISCIPLINARY
引用次数: 0
摘要
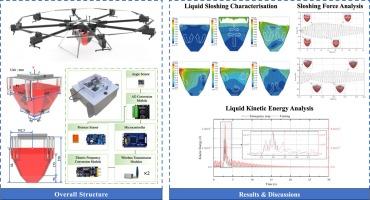
植物保护无人飞行器(UAV)除草剂罐内液体的晃动是影响无人飞行器运行稳定性和安全性的关键因素。针对这一问题,本研究通过飞行试验和模拟分析了液体的荡漾行为,以揭示荡漾液体的内在特性。构建了除草剂罐姿态监测系统,以收集植保无人机运行期间的加速度信号,并开发了相应的模型进行模拟。结果表明,基于有限体积法的模拟与实验结果一致,捕捉到的自由表面曲线的相关系数超过 0.89。在加速阶段,液体呈现周期性摇摆。在突然停止阶段,自由表面发生了翻转,在液体内部产生了大量气泡和涡流。这改变了自由液面的液流方向、荡动力和荡动模式,液体在壁面和拐角处的积聚和碰撞变得更加明显。在转弯工况下,液体从逆时针旋转过渡到摇摆,但与突然停止工况相比,液体滑动的幅度有所减小。综上所述,本研究基于传感技术和计算机数值模拟,探讨了植保无人机除草剂罐内的荡液过程,为植保无人机设备的优化和升级提供了启示。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Numerical simulation analysis and experimental research on liquid sloshing in herbicide tank of the plant protection UAV
The sloshing of the liquid inside the herbicide tank of a plant-protection unmanned aerial vehicle (UAV) is a key factor affecting the stability and safety of UAV operations. To address this issue, this study analyzed the sloshing behavior of the liquid by employing flight tests and simulations to reveal the intrinsic characteristics of the sloshing liquid. An attitude monitoring system for the herbicide tank was constructed to collect acceleration signals during the plant protection UAV operation, and a corresponding model was developed to conduct simulations. The results indicate that the simulations based on the finite volume method were consistent with the experimental results, with the correlation coefficients of the captured free-surface curves exceeding 0.89. During the acceleration stage, the liquid exhibited periodic swaying. In the sudden stop stage, the free surface overturned, generating a large number of bubbles and vortices inside the liquid. This changed the direction of liquid flow, sloshing force, and sloshing mode of the free liquid surface, with the accumulation and collision of the liquid at the wall and corners becoming more significant. Under the turning condition, the liquid transitioned from counterclockwise swirling to swaying, but the amplitude of the liquid sloshing was reduced compared with the sudden stop condition. In summary, this study explored the sloshing process in the herbicide tank of a plant protection UAV based on sensor technology and computer numerical simulations, providing insights for the optimization and upgrading of equipment for plant protection UAV.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Computers and Electronics in Agriculture
工程技术-计算机:跨学科应用
CiteScore
15.30
自引率
14.50%
发文量
800
审稿时长
62 days
期刊介绍:
Computers and Electronics in Agriculture provides international coverage of advancements in computer hardware, software, electronic instrumentation, and control systems applied to agricultural challenges. Encompassing agronomy, horticulture, forestry, aquaculture, and animal farming, the journal publishes original papers, reviews, and applications notes. It explores the use of computers and electronics in plant or animal agricultural production, covering topics like agricultural soils, water, pests, controlled environments, and waste. The scope extends to on-farm post-harvest operations and relevant technologies, including artificial intelligence, sensors, machine vision, robotics, networking, and simulation modeling. Its companion journal, Smart Agricultural Technology, continues the focus on smart applications in production agriculture.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


