{"title":"提高机械臂定位精度:柔性关节机械手的非线性阻尼方法","authors":"Amir Hossein Jafari, Rached Dhaouadi, Reza Jafari","doi":"10.1049/cth2.12707","DOIUrl":null,"url":null,"abstract":"<p>This article introduces an advanced nonlinear controller designed for optimizing the performance of a single-link robot arm featuring a flexible joint. The proposed nonlinear control strategy incorporates a Proportional-Integral (PI) controller in conjunction with a nonlinear velocity feedback component, aimed at providing effective nonlinear damping and suppressing vibrations. To validate the controller's performance, extensive simulations are conducted utilizing machine learning techniques within the Python environment. The performance of the proposed nonlinear damping controller is benchmarked against a conventional linear cascaded P-PI control structure, with both controllers fine-tuned using the Nelder-Mead algorithm. Simulation results demonstrate that the nonlinear damping controller yields substantial improvements in the dynamic behavior of the robot axis arm, showcasing superior step and sinusoidal position tracking performance, along with active vibration damping capabilities. This research contributes valuable insights into the enhanced nonlinear control strategies for flexible-joint robot arms, offering promising advancements in their overall dynamic performance.</p>","PeriodicalId":50382,"journal":{"name":"IET Control Theory and Applications","volume":"18 15","pages":"1968-1976"},"PeriodicalIF":2.2000,"publicationDate":"2024-06-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cth2.12707","citationCount":"0","resultStr":"{\"title\":\"Enhanced precision in robot arm positioning: A nonlinear damping approach for flexible joint manipulators\",\"authors\":\"Amir Hossein Jafari, Rached Dhaouadi, Reza Jafari\",\"doi\":\"10.1049/cth2.12707\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This article introduces an advanced nonlinear controller designed for optimizing the performance of a single-link robot arm featuring a flexible joint. The proposed nonlinear control strategy incorporates a Proportional-Integral (PI) controller in conjunction with a nonlinear velocity feedback component, aimed at providing effective nonlinear damping and suppressing vibrations. To validate the controller's performance, extensive simulations are conducted utilizing machine learning techniques within the Python environment. The performance of the proposed nonlinear damping controller is benchmarked against a conventional linear cascaded P-PI control structure, with both controllers fine-tuned using the Nelder-Mead algorithm. Simulation results demonstrate that the nonlinear damping controller yields substantial improvements in the dynamic behavior of the robot axis arm, showcasing superior step and sinusoidal position tracking performance, along with active vibration damping capabilities. This research contributes valuable insights into the enhanced nonlinear control strategies for flexible-joint robot arms, offering promising advancements in their overall dynamic performance.</p>\",\"PeriodicalId\":50382,\"journal\":{\"name\":\"IET Control Theory and Applications\",\"volume\":\"18 15\",\"pages\":\"1968-1976\"},\"PeriodicalIF\":2.2000,\"publicationDate\":\"2024-06-22\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cth2.12707\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Control Theory and Applications\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/cth2.12707\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Control Theory and Applications","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/cth2.12707","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Enhanced precision in robot arm positioning: A nonlinear damping approach for flexible joint manipulators
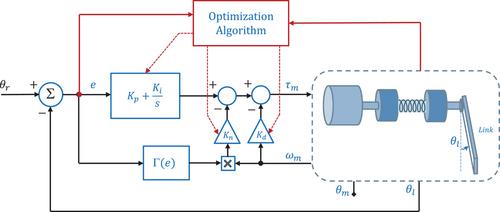
This article introduces an advanced nonlinear controller designed for optimizing the performance of a single-link robot arm featuring a flexible joint. The proposed nonlinear control strategy incorporates a Proportional-Integral (PI) controller in conjunction with a nonlinear velocity feedback component, aimed at providing effective nonlinear damping and suppressing vibrations. To validate the controller's performance, extensive simulations are conducted utilizing machine learning techniques within the Python environment. The performance of the proposed nonlinear damping controller is benchmarked against a conventional linear cascaded P-PI control structure, with both controllers fine-tuned using the Nelder-Mead algorithm. Simulation results demonstrate that the nonlinear damping controller yields substantial improvements in the dynamic behavior of the robot axis arm, showcasing superior step and sinusoidal position tracking performance, along with active vibration damping capabilities. This research contributes valuable insights into the enhanced nonlinear control strategies for flexible-joint robot arms, offering promising advancements in their overall dynamic performance.
期刊介绍:
IET Control Theory & Applications is devoted to control systems in the broadest sense, covering new theoretical results and the applications of new and established control methods. Among the topics of interest are system modelling, identification and simulation, the analysis and design of control systems (including computer-aided design), and practical implementation. The scope encompasses technological, economic, physiological (biomedical) and other systems, including man-machine interfaces.
Most of the papers published deal with original work from industrial and government laboratories and universities, but subject reviews and tutorial expositions of current methods are welcomed. Correspondence discussing published papers is also welcomed.
Applications papers need not necessarily involve new theory. Papers which describe new realisations of established methods, or control techniques applied in a novel situation, or practical studies which compare various designs, would be of interest. Of particular value are theoretical papers which discuss the applicability of new work or applications which engender new theoretical applications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


