{"title":"预测和优先考虑社区大会:通过实验学习成果","authors":"Benjamin W. Blonder, Michael H. Lim, Oscar Godoy","doi":"10.1111/ele.14535","DOIUrl":null,"url":null,"abstract":"<p>Community assembly provides the foundation for applications in biodiversity conservation, climate change, invasion, restoration and synthetic ecology. However, predicting and prioritising assembly outcomes remains difficult. We address this challenge via a mechanism-free approach useful when little data or knowledge exist (<i>LOVE</i>; Learning Outcomes Via Experiments). We carry out assembly experiments (‘actions’, here, random combinations of species additions) potentially in multiple environments, wait, and measure abundance outcomes. We then train a model to predict outcomes of novel actions or prioritise actions that would yield the most desirable outcomes. Across 10 single- and multi-environment datasets, when trained on 89 randomly selected actions, <i>LOVE</i> predicts outcomes with 0.5%–3.4% mean error, and prioritises actions for maximising richness, maximising abundance, or removing unwanted species, with 94%–99% mean true positive rate and 10%–84% mean true negative rate across tasks. <i>LOVE</i> complements existing mechanism-first approaches for community ecology and may help address numerous applied challenges.</p>","PeriodicalId":161,"journal":{"name":"Ecology Letters","volume":"27 10","pages":""},"PeriodicalIF":7.9000,"publicationDate":"2024-10-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1111/ele.14535","citationCount":"0","resultStr":"{\"title\":\"Predicting and Prioritising Community Assembly: Learning Outcomes via Experiments\",\"authors\":\"Benjamin W. Blonder, Michael H. Lim, Oscar Godoy\",\"doi\":\"10.1111/ele.14535\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Community assembly provides the foundation for applications in biodiversity conservation, climate change, invasion, restoration and synthetic ecology. However, predicting and prioritising assembly outcomes remains difficult. We address this challenge via a mechanism-free approach useful when little data or knowledge exist (<i>LOVE</i>; Learning Outcomes Via Experiments). We carry out assembly experiments (‘actions’, here, random combinations of species additions) potentially in multiple environments, wait, and measure abundance outcomes. We then train a model to predict outcomes of novel actions or prioritise actions that would yield the most desirable outcomes. Across 10 single- and multi-environment datasets, when trained on 89 randomly selected actions, <i>LOVE</i> predicts outcomes with 0.5%–3.4% mean error, and prioritises actions for maximising richness, maximising abundance, or removing unwanted species, with 94%–99% mean true positive rate and 10%–84% mean true negative rate across tasks. <i>LOVE</i> complements existing mechanism-first approaches for community ecology and may help address numerous applied challenges.</p>\",\"PeriodicalId\":161,\"journal\":{\"name\":\"Ecology Letters\",\"volume\":\"27 10\",\"pages\":\"\"},\"PeriodicalIF\":7.9000,\"publicationDate\":\"2024-10-12\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1111/ele.14535\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Ecology Letters\",\"FirstCategoryId\":\"93\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1111/ele.14535\",\"RegionNum\":1,\"RegionCategory\":\"环境科学与生态学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ECOLOGY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Ecology Letters","FirstCategoryId":"93","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1111/ele.14535","RegionNum":1,"RegionCategory":"环境科学与生态学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ECOLOGY","Score":null,"Total":0}
Predicting and Prioritising Community Assembly: Learning Outcomes via Experiments
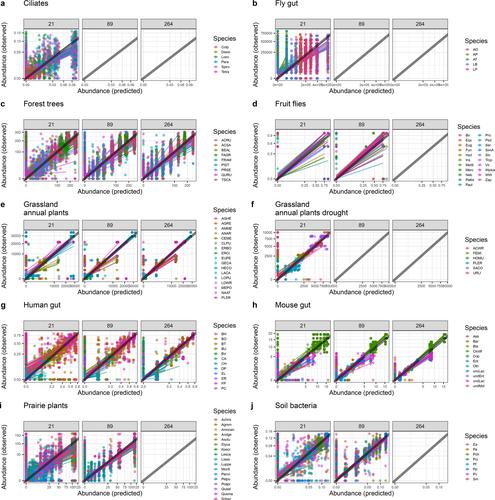
Community assembly provides the foundation for applications in biodiversity conservation, climate change, invasion, restoration and synthetic ecology. However, predicting and prioritising assembly outcomes remains difficult. We address this challenge via a mechanism-free approach useful when little data or knowledge exist (LOVE; Learning Outcomes Via Experiments). We carry out assembly experiments (‘actions’, here, random combinations of species additions) potentially in multiple environments, wait, and measure abundance outcomes. We then train a model to predict outcomes of novel actions or prioritise actions that would yield the most desirable outcomes. Across 10 single- and multi-environment datasets, when trained on 89 randomly selected actions, LOVE predicts outcomes with 0.5%–3.4% mean error, and prioritises actions for maximising richness, maximising abundance, or removing unwanted species, with 94%–99% mean true positive rate and 10%–84% mean true negative rate across tasks. LOVE complements existing mechanism-first approaches for community ecology and may help address numerous applied challenges.
期刊介绍:
Ecology Letters serves as a platform for the rapid publication of innovative research in ecology. It considers manuscripts across all taxa, biomes, and geographic regions, prioritizing papers that investigate clearly stated hypotheses. The journal publishes concise papers of high originality and general interest, contributing to new developments in ecology. Purely descriptive papers and those that only confirm or extend previous results are discouraged.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


