受辅助超材料启发的机器人皮肤,用于软致动器的可编程弯曲
IF 7.9
2区 材料科学
Q1 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
摘要
本文介绍了一类受辅助超材料启发的机器人表皮,它可以实现软气动执行器的可编程弯曲。通过实验和数值模拟相结合的方法,证明了这些机器人表皮在控制软致动器的弯曲曲率和环形膨胀方面的效率。然后进行参数研究,探索超材料表皮几何参数的变化如何影响弯曲致动器的性能。具体来说,我们的研究表明,通过调整超材料表皮在垂直和环形方向上的单元数,可以实现一定范围的弯曲曲率(0.0077 毫米-1 至 0.0097 毫米-1)和横截面直径(38.4 毫米至 44.0 毫米),以弯曲 2 毫米厚壁的充气圆柱管,该圆柱管的初始长度为 104.3 毫米,初始横截面直径为 29.0 毫米,充气量为 75 毫升。此外,还介绍了各种生物启发软致动器,它们表现出复杂的弯曲行为。该研究成果证明了所提出的策略的有效性,即通过调整超材料表皮中单元格的几何参数和排列,实现定制的弯曲和形状变形。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Robotic skins inspired by auxetic metamaterials for programmable bending of soft actuators
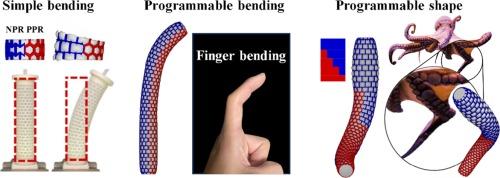
This paper presents a class of robotic skins inspired by auxetic metamaterials, which enable programmable bending in soft pneumatic actuators. The efficiency of these robotic skins in controlling bending curvature and hoop expansion of the soft actuators is demonstrated through a combination of experiments and numerical simulations. Parametric studies are then performed to explore how variations in the geometric parameters of the metamaterial skin affect the performance of the bending actuators. Specifically, our study demonstrates that a range of bending curvatures (0.0077 mm−1 to 0.0097 mm−1) and cross-section diameters (38.4 mm to 44.0 mm) can be achieved by adjusting the unit cell numbers of metamaterial skin in the vertical and hoop directions for bending a 2 mm-thickness-walled inflatable cylindrical tube, which is characterized by an initial length of 104.3 mm, an initial cross-section diameter of 29.0 mm, and at an inflation volume of 75 mL. Moreover, a variety of bio-inspired soft actuators exhibiting complex bending behaviors are presented. The work demonstrates the effectiveness of the proposed strategy for achieving customized curved bending and shape-morphing by adjusting the geometric parameters and arrangement of the unit cells in the metamaterial skins.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
Materials & Design
Engineering-Mechanical Engineering
CiteScore
14.30
自引率
7.10%
发文量
1028
审稿时长
85 days
期刊介绍:
Materials and Design is a multi-disciplinary journal that publishes original research reports, review articles, and express communications. The journal focuses on studying the structure and properties of inorganic and organic materials, advancements in synthesis, processing, characterization, and testing, the design of materials and engineering systems, and their applications in technology. It aims to bring together various aspects of materials science, engineering, physics, and chemistry.
The journal explores themes ranging from materials to design and aims to reveal the connections between natural and artificial materials, as well as experiment and modeling. Manuscripts submitted to Materials and Design should contain elements of discovery and surprise, as they often contribute new insights into the architecture and function of matter.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


