用于跨尺度半导体检测的 2-DOF 压电平台
IF 7.1
1区 工程技术
Q1 ENGINEERING, MECHANICAL
International Journal of Mechanical Sciences
Pub Date : 2024-10-01
DOI:10.1016/j.ijmecsci.2024.109765
引用次数: 0
摘要
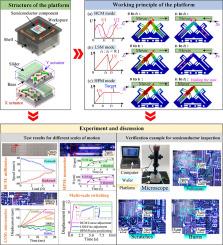
为了应对半导体检测中实现大行程和高精度的挑战,本研究提出了一种新型 2-DOF 跨尺度压电定位平台。在半导体检测中,该平台利用椭圆、粘滑和直推驱动模式来满足毫米、微米和纳米尺度的运动要求。通过向压电单元施加确定的电信号,该平台可实现毫米尺度的高速连续模式(HCM)、微米尺度的低速步进模式(LSM)和纳米尺度的高精度定位模式(HPM)。对平台柔性定子的设计进行了理论分析和模拟,并分析了其动态特性。制作、组装和实验测试了原型,以研究拟议平台的机械性能。结果表明,原型成功实现了三种模式下的跨尺度运动:在 HCM 模式下实现了 62.47 mm/s 的最大空载速度;在 LSM 模式下实现了 14.62 μm/s 的低速步进运动;在 HPM 模式下实现了分辨率为 25 nm、范围在 ±21 μm 内的高精度定位。通过三种驱动模式的灵活切换和配合,该平台可以毫米级速度快速接近目标,并以微米级运动进一步接近,最终实现纳米级精度定位。最后,该定位平台被成功应用于半导体器件的缺陷检测。本研究探索了压电定位平台的新型跨尺度驱动方法,为半导体元件检测相关的精密操控研究提供了一种新方法。本文章由计算机程序翻译,如有差异,请以英文原文为准。
A 2-DOF piezoelectric platform for cross-scale semiconductor inspection
To address the challenge of achieving extensive travel and high precision in semiconductor inspection, this study proposes a novel 2-DOF cross-scale piezoelectric positioning platform. In semiconductor inspection, the platform utilizes elliptical, stick-slip, and direct-push drive modes to meet the motion requirements at millimeter, micrometer, and nanometer scales. By applying defined electrical signals to the piezoelectric units, the platform can achieve high-speed continuous mode (HCM) for the millimeter scale, low-speed stepping mode (LSM) for the micrometer scale, and high-precision positioning mode (HPM) for the nanometer scale. Theoretical analysis and simulations were performed to design the flexible stator of the platform, and its dynamic characteristics were analyzed. A prototype was fabricated, assembled, and experimentally tested to investigate the mechanical performance of the proposed platform. The results show that the prototype successfully realizes cross-scale motion in the three modes: achieving a maximum no-load speed of 62.47 mm/s in HCM, a low-speed stepping motion of 14.62 μm/s in LSM, and high-precision positioning with a resolution of 25 nm within a range of ±21 μm in HPM. Through the flexible switching and cooperation of the three drive modes, the platform can quickly approach the target at millimeter speed, further approach with micrometer step motion, and finally achieve nanometer precision positioning. Finally, the positioning platform was successfully applied to inspect semiconductor devices for defect inspection. This study explores a novel cross-scale driving method for piezoelectric positioning platforms, which provides a new approach for precision manipulation research related to semiconductor component inspection.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

International Journal of Mechanical Sciences
工程技术-工程:机械
CiteScore
12.80
自引率
17.80%
发文量
769
审稿时长
19 days
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


