Yu Xie, Jing Pan, Longteng Yu, Hubiao Fang, Shaoliang Yu, Ning Zhou, Limin Tong, Lei Zhang
{"title":"用于触觉可视化和人机界面的光学微型/纳米纤维多轴力传感器","authors":"Yu Xie, Jing Pan, Longteng Yu, Hubiao Fang, Shaoliang Yu, Ning Zhou, Limin Tong, Lei Zhang","doi":"10.1002/advs.202404343","DOIUrl":null,"url":null,"abstract":"<p>Tactile sensors with capability of multiaxial force perception play a vital role in robotics and human–machine interfaces. Flexible optical waveguide sensors have been an emerging paradigm in tactile sensing due to their high sensitivity, fast response, and antielectromagnetic interference. Herein, a flexible multiaxial force sensor enabled by U-shaped optical micro/nanofibers (MNFs) is reported. The MNF is embedded within an elastomer film topped with a dome-shaped protrusion. When the protrusion is subjected to vector forces, the embedded MNF undergoes anisotropic deformations, yielding time-resolved variations in light transmission. Detection of both normal and shear forces is achieved with sensitivities reaching 50.7 dB N<sup>−1</sup> (14% kPa<sup>−1</sup>) and 82.2 dB N<sup>−1</sup> (21% kPa<sup>−1</sup>), respectively. Notably, the structural asymmetry of the MNF induces asymmetrical optical modes, granting the sensor directional responses to four-directional shear forces. As proof-of-concept applications, tactile visualizations for texture and relief pattern recognition are realized with a spatial resolution of 160 µm. Moreover, a dual U-shaped MNF configuration is demonstrated as a human–machine interface for cursor manipulation. This work represents a step towards advanced multiaxial tactile sensing.</p>","PeriodicalId":117,"journal":{"name":"Advanced Science","volume":"11 45","pages":""},"PeriodicalIF":14.1000,"publicationDate":"2024-10-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/advs.202404343","citationCount":"0","resultStr":"{\"title\":\"Optical Micro/Nanofiber Enabled Multiaxial Force Sensor for Tactile Visualization and Human–Machine Interface\",\"authors\":\"Yu Xie, Jing Pan, Longteng Yu, Hubiao Fang, Shaoliang Yu, Ning Zhou, Limin Tong, Lei Zhang\",\"doi\":\"10.1002/advs.202404343\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Tactile sensors with capability of multiaxial force perception play a vital role in robotics and human–machine interfaces. Flexible optical waveguide sensors have been an emerging paradigm in tactile sensing due to their high sensitivity, fast response, and antielectromagnetic interference. Herein, a flexible multiaxial force sensor enabled by U-shaped optical micro/nanofibers (MNFs) is reported. The MNF is embedded within an elastomer film topped with a dome-shaped protrusion. When the protrusion is subjected to vector forces, the embedded MNF undergoes anisotropic deformations, yielding time-resolved variations in light transmission. Detection of both normal and shear forces is achieved with sensitivities reaching 50.7 dB N<sup>−1</sup> (14% kPa<sup>−1</sup>) and 82.2 dB N<sup>−1</sup> (21% kPa<sup>−1</sup>), respectively. Notably, the structural asymmetry of the MNF induces asymmetrical optical modes, granting the sensor directional responses to four-directional shear forces. As proof-of-concept applications, tactile visualizations for texture and relief pattern recognition are realized with a spatial resolution of 160 µm. Moreover, a dual U-shaped MNF configuration is demonstrated as a human–machine interface for cursor manipulation. This work represents a step towards advanced multiaxial tactile sensing.</p>\",\"PeriodicalId\":117,\"journal\":{\"name\":\"Advanced Science\",\"volume\":\"11 45\",\"pages\":\"\"},\"PeriodicalIF\":14.1000,\"publicationDate\":\"2024-10-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/advs.202404343\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Science\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://advanced.onlinelibrary.wiley.com/doi/10.1002/advs.202404343\",\"RegionNum\":1,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Science","FirstCategoryId":"88","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/advs.202404343","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
摘要
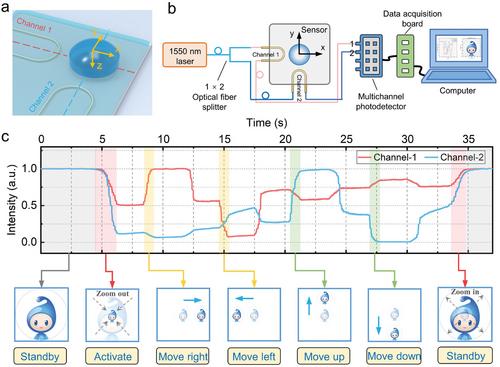
具有多轴向力感知能力的触觉传感器在机器人和人机界面中发挥着重要作用。柔性光波导传感器具有灵敏度高、响应速度快、抗电磁干扰等优点,已成为触觉传感领域的新兴典范。本文报告了一种由 U 形光学微型/纳米纤维(MNF)实现的柔性多轴力传感器。MNF 嵌在弹性体薄膜中,薄膜顶部有一个圆顶形突起。当突起受到矢量力作用时,嵌入的 MNF 会发生各向异性的变形,从而产生时间分辨的透光率变化。对法向力和剪切力的检测灵敏度分别达到 50.7 dB N-1 (14% kPa-1) 和 82.2 dB N-1 (21% kPa-1)。值得注意的是,MNF 结构的不对称性诱导了非对称光学模式,使传感器能够对四个方向的剪切力做出定向响应。作为概念验证应用,实现了用于纹理和浮雕图案识别的触觉可视化,空间分辨率为 160 微米。此外,还演示了双 U 形 MNF 配置作为光标操作的人机界面。这项工作标志着向先进的多轴触觉传感技术迈出了一步。
Optical Micro/Nanofiber Enabled Multiaxial Force Sensor for Tactile Visualization and Human–Machine Interface
Tactile sensors with capability of multiaxial force perception play a vital role in robotics and human–machine interfaces. Flexible optical waveguide sensors have been an emerging paradigm in tactile sensing due to their high sensitivity, fast response, and antielectromagnetic interference. Herein, a flexible multiaxial force sensor enabled by U-shaped optical micro/nanofibers (MNFs) is reported. The MNF is embedded within an elastomer film topped with a dome-shaped protrusion. When the protrusion is subjected to vector forces, the embedded MNF undergoes anisotropic deformations, yielding time-resolved variations in light transmission. Detection of both normal and shear forces is achieved with sensitivities reaching 50.7 dB N−1 (14% kPa−1) and 82.2 dB N−1 (21% kPa−1), respectively. Notably, the structural asymmetry of the MNF induces asymmetrical optical modes, granting the sensor directional responses to four-directional shear forces. As proof-of-concept applications, tactile visualizations for texture and relief pattern recognition are realized with a spatial resolution of 160 µm. Moreover, a dual U-shaped MNF configuration is demonstrated as a human–machine interface for cursor manipulation. This work represents a step towards advanced multiaxial tactile sensing.
期刊介绍:
Advanced Science is a prestigious open access journal that focuses on interdisciplinary research in materials science, physics, chemistry, medical and life sciences, and engineering. The journal aims to promote cutting-edge research by employing a rigorous and impartial review process. It is committed to presenting research articles with the highest quality production standards, ensuring maximum accessibility of top scientific findings. With its vibrant and innovative publication platform, Advanced Science seeks to revolutionize the dissemination and organization of scientific knowledge.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


