利用材料基因表达调制实现可改变的机器人皮肤
IF 18.5
1区 材料科学
Q1 CHEMISTRY, MULTIDISCIPLINARY
引用次数: 0
摘要
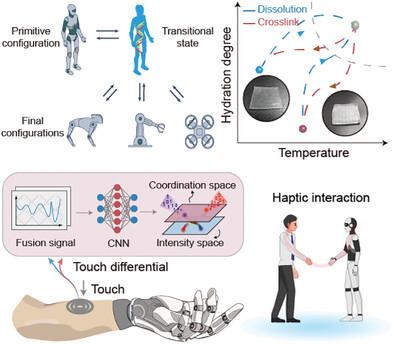
集成了人工触觉传感元件的机器人皮肤可以极大地补充社交机器人的感知维度,成为人机交互(HRI)中不可或缺的一部分。然而,由于单一成分的特性范围有限,现有的设计框架在多功能性和可持续性之间折衷。在这里,我们提出了一种由同质传感单元构成的可改变机器人皮肤,它能够在广泛的范围内循环改变其固有特性。实现定位和压力传感子单元的必要特性可以编码在特征图案中,并通过条件诱导分化提取出来,这与生命系统中的基因表达极为相似。因此,包括模量、表面状态和电导率在内的特征参数最多可实现 100 倍的差异,从而驱动目标属性耦合。材料的跨时空重构实现了功能构件的超级定制,推进了不同触摸模式(包括位置、压力、持续时间和运动模式)的灵活分离和组合。作为概念验证,展示了集成了位置感应层和压力感应层的可改变机器人皮肤。它能根据较少的通道数据准确区分和识别多维触摸动作,展示了一种高效的触觉交互应用。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Alterable Robotic Skin Using Material Gene Expression Modulation
Robotic skins that integrate artificial tactile sensing elements can substantially complement the perception dimension of social robots, presenting an indispensable part in human-robot interaction (HRI). However, existing design frameworks compromise between versatility and sustainability due to the restricted range of characteristics available for a single constituent. Here an alterable robotic skin constructed from homogeneous sensing units are proposed, capable of cyclically realtering their inherent characteristics across a wide spectrum. Necessary characteristics to achieve positioning and pressure sensing subunits can be encoded in the feature motifs and extracted through condition-induced differentiation, showcasing a remarkable resemblance to the gene expression in the living system. By virtue of this, up to 100-fold differences in feature parameters are achieved, including modulus, surface state, and conductivity, to drive the target attribute coupling. The trans-temporal reconstruction of materials enables the superb customization of functional building blocks, advancing the flexible separation and combination of different touch modes, including location, pressure, duration, and motion pattern. As a proof of concept, the alterable robotic skin is demonstrated that integrates a position-sensing layer and a pressure-sensing layer. It can accurately distinguish and recognize multi-dimensional touch motions based on less-channel data, which showcases an efficient haptic interaction application.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
Advanced Functional Materials
工程技术-材料科学:综合
CiteScore
29.50
自引率
4.20%
发文量
2086
审稿时长
2.1 months
期刊介绍:
Firmly established as a top-tier materials science journal, Advanced Functional Materials reports breakthrough research in all aspects of materials science, including nanotechnology, chemistry, physics, and biology every week.
Advanced Functional Materials is known for its rapid and fair peer review, quality content, and high impact, making it the first choice of the international materials science community.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


