通过黎曼度量保全重建可变形曲面
IF 4.3
3区 计算机科学
Q2 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
从单目图像中估计物体的姿态是计算机视觉中的一个基本反问题。由于这一问题的不确定性,解决这一问题需要结合变形先验。在实践中,许多材料在操作时不会出现明显的收缩或延伸,这就构成了可靠且众所周知的先验。在数学上,这意味着黎曼度量的保留。神经网络能够以任意精度逼近曲面,并允许计算微分几何量,因此为解决曲面重构问题提供了完美的平台。本文介绍了一种从图像序列中推断连续可变形曲面的方法,该方法以多种技术为基准,无需离线训练即可达到最先进的性能。作为一种按帧优化的方法,我们的方法可以完善其估计值,这与那些基于执行单一推理步骤的方法截然不同。尽管每次更新都会强制执行差分几何约束,但我们的方法是所有测试过的基于优化的方法中速度最快的。本文章由计算机程序翻译,如有差异,请以英文原文为准。
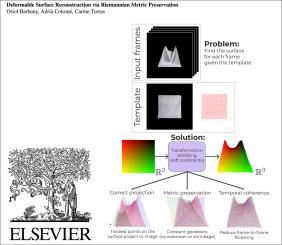
Deformable surface reconstruction via Riemannian metric preservation
Estimating the pose of an object from a monocular image is a fundamental inverse problem in computer vision. Due to its ill-posed nature, solving this problem requires incorporating deformation priors. In practice, many materials do not perceptibly shrink or extend when manipulated, constituting a reliable and well-known prior. Mathematically, this translates to the preservation of the Riemannian metric. Neural networks offer the perfect playground to solve the surface reconstruction problem as they can approximate surfaces with arbitrary precision and allow the computation of differential geometry quantities. This paper presents an approach for inferring continuous deformable surfaces from a sequence of images, which is benchmarked against several techniques and achieves state-of-the-art performance without the need for offline training. Being a method that performs per-frame optimization, our method can refine its estimates, contrary to those based on performing a single inference step. Despite enforcing differential geometry constraints at each update, our approach is the fastest of all the tested optimization-based methods.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Computer Vision and Image Understanding
工程技术-工程:电子与电气
CiteScore
7.80
自引率
4.40%
发文量
112
审稿时长
79 days
期刊介绍:
The central focus of this journal is the computer analysis of pictorial information. Computer Vision and Image Understanding publishes papers covering all aspects of image analysis from the low-level, iconic processes of early vision to the high-level, symbolic processes of recognition and interpretation. A wide range of topics in the image understanding area is covered, including papers offering insights that differ from predominant views.
Research Areas Include:
• Theory
• Early vision
• Data structures and representations
• Shape
• Range
• Motion
• Matching and recognition
• Architecture and languages
• Vision systems
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


