D. Anastasia Aubeeluck, Cameron Forbrigger, Sara Mohseni Taromsari, Tianhao Chen, Eric Diller and Hani E. Naguib*,
{"title":"丝网印刷电容式触觉传感器用于监测工具与组织之间的相互作用以及外科磁性微型夹钳的抓取性能","authors":"D. Anastasia Aubeeluck, Cameron Forbrigger, Sara Mohseni Taromsari, Tianhao Chen, Eric Diller and Hani E. Naguib*, ","doi":"10.1021/acsaelm.4c0084110.1021/acsaelm.4c00841","DOIUrl":null,"url":null,"abstract":"<p >With miniaturization and wireless actuation for a class of magnetic microgrippers for robot-assisted minimally invasive endoscopic intraventricular surgery, surgeons are unable to acquire tactile sensory information on tissues and organs during tool–tissue manipulation and grasping tasks. To minimize the risks of tissue trauma and improve surgical performance, surgeons require haptic feedback technologies to be integrated onto microscale surgical tools for tactile information. However, current sensors cannot be equipped onto the interior jaw of the microgripper due to low-pressure range and small-scale criteria for RMIS implementation for pediatric neurosurgery. This study proposes a 24 mm<sup>2</sup>, ultrathin, and flexible capacitive tactile sensor for the interior jaws of a disposable surgical magnetically-controlled microgripper to potentially monitor and regulate tool–tissue manipulation pressures/forces in real time to improve grasping performances and quality of surgical procedures. To lower fabrication costs, multiple layers of the capacitive sensor were screen-printed and assembled to produce a 100 μm thick sensor. To enhance the range and sensitivity, four different morphologies were developed for the dielectric layer and integrated into the sensor design. The dielectric layers were fabricated by optimizing and processing thermoplastic polyurethane (TPU) into a suitable ink adequate for screen printing large surfaces and microstructures. The final optimized capacitive tactile sensor with a grid-like microstructured dielectric design’s electromechanical performance was modeled as a bilinear response with two sensitivity modes for a sensing range of 0.42–54.2 kPa (0.01–1.30 N applied on 24 mm<sup>2</sup> of gripper jaw). The results also indicated performance comparable to more expensive tactile sensors with a hysteresis of 8.8% and a repeatable response to applied cycling loadings with a maximum response signal decay of 1.85%. This study highlights that simple screen printing method can be used as a low-cost alternative to fabricate high-performance tactile sensors to be integrated to the interior jaw of the microgripper designed for disposable endoscopic intraventricular surgeries.</p>","PeriodicalId":3,"journal":{"name":"ACS Applied Electronic Materials","volume":"6 9","pages":"6365–6377 6365–6377"},"PeriodicalIF":4.3000,"publicationDate":"2024-08-31","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Screen-Printed Capacitive Tactile Sensor for Monitoring Tool–Tissue Interactions and Grasping Performances of a Surgical Magnetic Microgripper\",\"authors\":\"D. Anastasia Aubeeluck, Cameron Forbrigger, Sara Mohseni Taromsari, Tianhao Chen, Eric Diller and Hani E. Naguib*, \",\"doi\":\"10.1021/acsaelm.4c0084110.1021/acsaelm.4c00841\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p >With miniaturization and wireless actuation for a class of magnetic microgrippers for robot-assisted minimally invasive endoscopic intraventricular surgery, surgeons are unable to acquire tactile sensory information on tissues and organs during tool–tissue manipulation and grasping tasks. To minimize the risks of tissue trauma and improve surgical performance, surgeons require haptic feedback technologies to be integrated onto microscale surgical tools for tactile information. However, current sensors cannot be equipped onto the interior jaw of the microgripper due to low-pressure range and small-scale criteria for RMIS implementation for pediatric neurosurgery. This study proposes a 24 mm<sup>2</sup>, ultrathin, and flexible capacitive tactile sensor for the interior jaws of a disposable surgical magnetically-controlled microgripper to potentially monitor and regulate tool–tissue manipulation pressures/forces in real time to improve grasping performances and quality of surgical procedures. To lower fabrication costs, multiple layers of the capacitive sensor were screen-printed and assembled to produce a 100 μm thick sensor. To enhance the range and sensitivity, four different morphologies were developed for the dielectric layer and integrated into the sensor design. The dielectric layers were fabricated by optimizing and processing thermoplastic polyurethane (TPU) into a suitable ink adequate for screen printing large surfaces and microstructures. The final optimized capacitive tactile sensor with a grid-like microstructured dielectric design’s electromechanical performance was modeled as a bilinear response with two sensitivity modes for a sensing range of 0.42–54.2 kPa (0.01–1.30 N applied on 24 mm<sup>2</sup> of gripper jaw). The results also indicated performance comparable to more expensive tactile sensors with a hysteresis of 8.8% and a repeatable response to applied cycling loadings with a maximum response signal decay of 1.85%. This study highlights that simple screen printing method can be used as a low-cost alternative to fabricate high-performance tactile sensors to be integrated to the interior jaw of the microgripper designed for disposable endoscopic intraventricular surgeries.</p>\",\"PeriodicalId\":3,\"journal\":{\"name\":\"ACS Applied Electronic Materials\",\"volume\":\"6 9\",\"pages\":\"6365–6377 6365–6377\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2024-08-31\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"ACS Applied Electronic Materials\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://pubs.acs.org/doi/10.1021/acsaelm.4c00841\",\"RegionNum\":3,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"ACS Applied Electronic Materials","FirstCategoryId":"88","ListUrlMain":"https://pubs.acs.org/doi/10.1021/acsaelm.4c00841","RegionNum":3,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Screen-Printed Capacitive Tactile Sensor for Monitoring Tool–Tissue Interactions and Grasping Performances of a Surgical Magnetic Microgripper
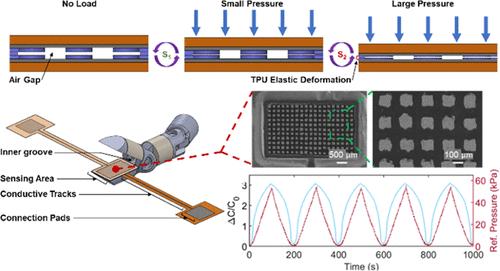
With miniaturization and wireless actuation for a class of magnetic microgrippers for robot-assisted minimally invasive endoscopic intraventricular surgery, surgeons are unable to acquire tactile sensory information on tissues and organs during tool–tissue manipulation and grasping tasks. To minimize the risks of tissue trauma and improve surgical performance, surgeons require haptic feedback technologies to be integrated onto microscale surgical tools for tactile information. However, current sensors cannot be equipped onto the interior jaw of the microgripper due to low-pressure range and small-scale criteria for RMIS implementation for pediatric neurosurgery. This study proposes a 24 mm2, ultrathin, and flexible capacitive tactile sensor for the interior jaws of a disposable surgical magnetically-controlled microgripper to potentially monitor and regulate tool–tissue manipulation pressures/forces in real time to improve grasping performances and quality of surgical procedures. To lower fabrication costs, multiple layers of the capacitive sensor were screen-printed and assembled to produce a 100 μm thick sensor. To enhance the range and sensitivity, four different morphologies were developed for the dielectric layer and integrated into the sensor design. The dielectric layers were fabricated by optimizing and processing thermoplastic polyurethane (TPU) into a suitable ink adequate for screen printing large surfaces and microstructures. The final optimized capacitive tactile sensor with a grid-like microstructured dielectric design’s electromechanical performance was modeled as a bilinear response with two sensitivity modes for a sensing range of 0.42–54.2 kPa (0.01–1.30 N applied on 24 mm2 of gripper jaw). The results also indicated performance comparable to more expensive tactile sensors with a hysteresis of 8.8% and a repeatable response to applied cycling loadings with a maximum response signal decay of 1.85%. This study highlights that simple screen printing method can be used as a low-cost alternative to fabricate high-performance tactile sensors to be integrated to the interior jaw of the microgripper designed for disposable endoscopic intraventricular surgeries.
期刊介绍:
ACS Applied Electronic Materials is an interdisciplinary journal publishing original research covering all aspects of electronic materials. The journal is devoted to reports of new and original experimental and theoretical research of an applied nature that integrate knowledge in the areas of materials science, engineering, optics, physics, and chemistry into important applications of electronic materials. Sample research topics that span the journal's scope are inorganic, organic, ionic and polymeric materials with properties that include conducting, semiconducting, superconducting, insulating, dielectric, magnetic, optoelectronic, piezoelectric, ferroelectric and thermoelectric.
Indexed/Abstracted:
Web of Science SCIE
Scopus
CAS
INSPEC
Portico
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


