软体机器人的生物启发自主性
IF 9.6
Q1 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
摘要
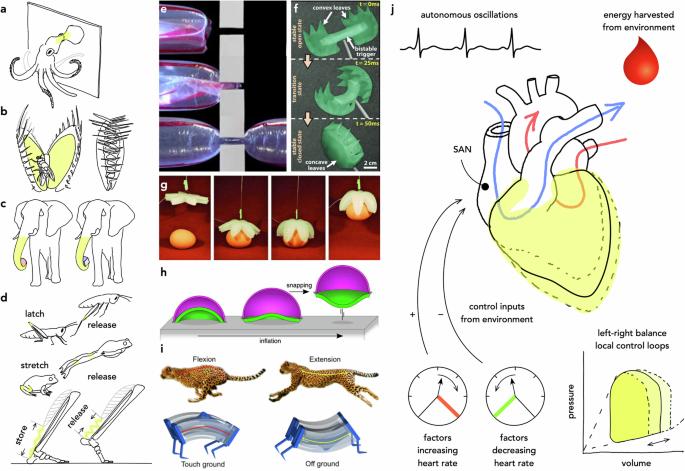
软体机器人驱动概念已经达到,有时甚至超过了自然界的同类概念。相比之下,人工再现自然水平的自主性仍是一项尚未解决的挑战。在此,我们定义了能量和控制自主性的衡量标准,并对具有代表性的软体机器人进行了分类,从而得出了这一结论。我们认为,为了推动这一领域的发展,我们应该重点关注软体机器人与其环境之间的互动,因为在自然界中,自主性也是在相互依存中实现的。如果我们能更好地理解自然界是如何利用与环境的相互作用的,这将使我们能够在未来设计出自主性更强的受生物启发的软体机器人。自然界中的生物将继续为软体机器人的高级功能提供灵感。本视角将讨论实现机器人的自主性如何需要在设计中考虑到与环境的相互作用。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Bio-inspired autonomy in soft robots
Soft robotic actuation concepts meet and sometimes exceed their natural counterparts. In contrast, artificially recreating natural levels of autonomy is still an unmet challenge. Here, we come to this conclusion after defining a measure of energy- and control-autonomy and classifying a representative selection of soft robots. We argue that, in order to advance the field, we should focus our attention on interactions between soft robots and their environment, because in nature autonomy is also achieved in interdependence. If we better understand how interactions with an environment are leveraged in nature, this will enable us to design bio-inspired soft robots with much greater autonomy in the future. Naturally occurring organisms continue to provide inspiration for advanced functionality in soft robots. This Perspective discusses how achieving autonomy in robots will require interactions with their environment to be taken into consideration in their design.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Communications Materials
MATERIALS SCIENCE, MULTIDISCIPLINARY-
CiteScore
12.10
自引率
1.30%
发文量
85
审稿时长
17 weeks
期刊介绍:
Communications Materials, a selective open access journal within Nature Portfolio, is dedicated to publishing top-tier research, reviews, and commentary across all facets of materials science. The journal showcases significant advancements in specialized research areas, encompassing both fundamental and applied studies. Serving as an open access option for materials sciences, Communications Materials applies less stringent criteria for impact and significance compared to Nature-branded journals, including Nature Communications.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


