利用可变形液态金属纳米粒子实现 4D 打印混合软机器人
IF 27.4
1区 材料科学
Q1 CHEMISTRY, MULTIDISCIPLINARY
引用次数: 0
摘要
近年来,软体机器人技术已成为一个迅速扩展的前沿研究领域,它从自然界中软体生物的运动机制中汲取灵感,实现平滑而复杂的运动,应用于多种领域。然而,由于材料选择的局限性以及传统制造方法所涉及的复杂、多步骤工艺,制造具有混合结构的软体机器人仍然具有挑战性。本文介绍了一种新颖的直接一步增材制造(3D 打印)方法,用于制造由软性和刚性部件组成的混合机器人,以完成复杂的任务。受可变形液态金属纳米颗粒(LMNPs)的启发,通过将不同形状的镓基纳米颗粒(GNPs)集成到三维打印聚合物中,开发出了一种具有可调节机械性能和变形能力的功能材料工具包。然后,通过 GNPs 集成墨水的单一配方,直接打印出组装或一体式混合软硬机器人。这种制造方法可以精确控制机器人本体混合结构的机械性能和形状记忆性能,并进行定制化结构设计。通过设计和制造作为高精度抓手、生物启发电机和手部康复装置的混合机器人,进一步证明了它们的能力。本文章由计算机程序翻译,如有差异,请以英文原文为准。
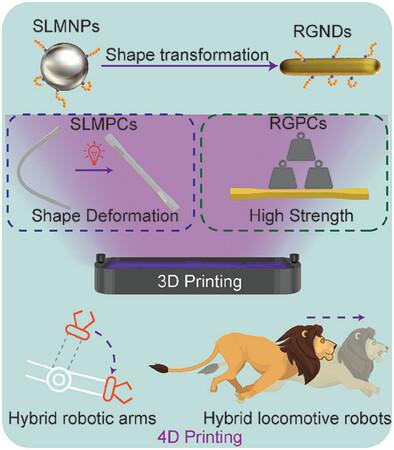
4D Printing Hybrid Soft Robots Enabled by Shape-Transformable Liquid Metal Nanoparticles
In recent years, soft robotics has emerged as a rapidly expanding frontier research field that draws inspiration from the locomotion mechanisms of soft-bodied creatures in nature to achieve smooth and complex motion for diverse applications. However, the fabrication of soft robots with hybrid structures remains challenging due to limitations in material selection and the complex, multi-step processes involved in traditional manufacturing methods. Herein, a novel direct one-step additive manufacturing (3D printing) approach is introduced for the fabrication of hybrid robots composed of soft and rigid components for sophisticated tasks. Inspired by the shape-transformable liquid metal nanoparticles (LMNPs), a functional material toolkit with tuneable mechanical properties and deformability is developed by integrating differently shaped gallium-based nanoparticles (GNPs) into the 3D printing polymers. Then the direct printing of assembled or one-piece hybrid soft-rigid robots is presented through a single recipe of GNPs-integrated inks. This fabrication method enables precise control of the mechanical properties and shape memory properties within the hybrid structures of robot body with a customized structure design. Their capabilities are further demonstrated through the design and fabrication of hybrid robots as high-precision gripper, bioinspired motor, and hand rehabilitation device.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
Advanced Materials
工程技术-材料科学:综合
CiteScore
43.00
自引率
4.10%
发文量
2182
审稿时长
2 months
期刊介绍:
Advanced Materials, one of the world's most prestigious journals and the foundation of the Advanced portfolio, is the home of choice for best-in-class materials science for more than 30 years. Following this fast-growing and interdisciplinary field, we are considering and publishing the most important discoveries on any and all materials from materials scientists, chemists, physicists, engineers as well as health and life scientists and bringing you the latest results and trends in modern materials-related research every week.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


