Hyeongmin Je, Sukyoung Won, Jeong Jae Wie, Sanha Kim
{"title":"利用微旋机器人的集体行为进行空间选择性超精密抛光和清洁","authors":"Hyeongmin Je, Sukyoung Won, Jeong Jae Wie, Sanha Kim","doi":"10.1002/sstr.202400245","DOIUrl":null,"url":null,"abstract":"Untethered magnetic actuation is an attractive technique for controlling a batch of micrometer-sized soft robots. Recent advancements have enabled each robot to follow its path independently using a single magnetic device. However, applications of magnetic soft microrobots are mostly biased toward the biomedical field. In this study, thermoplastic polyurethane–Fe<sub>3</sub>O<sub>4</sub> nanocomposite soft spinning microrobots, that is, spinbots that actuate on a tabletop magnetic stirrer, were utilized as innovative precision manufacturing tools for spatially selective precision polishing and cleaning. The pivot motion of the revolving spinbots, which involves repetitive sweeping during rotation cycles, is explored. This sweeping action physically removes nanometer-sized surface contaminants from the workpiece, achieving a cleaning efficiency of 99.6%. Multiple spinbots, up to 42 in total, simultaneously operated along their own orbital pathways on three vertically stacked wafers, thereby demonstrating an unprecedented cleaning method. In addition, the spinbots precisely removed materials from the workpiece using a three-body abrasion mechanism. Furthermore, the spinbots contributed to precise material removal, resulting in remarkable surface polishing (<i>R</i>\n<sub>a</sub> ≈ 1.8 nm). This novel polishing system, which uses the collective behavior of multiple spinbots on a tabletop magnetic stirrer, is 1000-fold lighter than current state-of-the-art equipment aimed at achieving similar levels of fine finishing.","PeriodicalId":21841,"journal":{"name":"Small Structures","volume":"46 1","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2024-09-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Spatially Selective Ultraprecision Polishing and Cleaning by Collective Behavior of Micro Spinbots\",\"authors\":\"Hyeongmin Je, Sukyoung Won, Jeong Jae Wie, Sanha Kim\",\"doi\":\"10.1002/sstr.202400245\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"Untethered magnetic actuation is an attractive technique for controlling a batch of micrometer-sized soft robots. Recent advancements have enabled each robot to follow its path independently using a single magnetic device. However, applications of magnetic soft microrobots are mostly biased toward the biomedical field. In this study, thermoplastic polyurethane–Fe<sub>3</sub>O<sub>4</sub> nanocomposite soft spinning microrobots, that is, spinbots that actuate on a tabletop magnetic stirrer, were utilized as innovative precision manufacturing tools for spatially selective precision polishing and cleaning. The pivot motion of the revolving spinbots, which involves repetitive sweeping during rotation cycles, is explored. This sweeping action physically removes nanometer-sized surface contaminants from the workpiece, achieving a cleaning efficiency of 99.6%. Multiple spinbots, up to 42 in total, simultaneously operated along their own orbital pathways on three vertically stacked wafers, thereby demonstrating an unprecedented cleaning method. In addition, the spinbots precisely removed materials from the workpiece using a three-body abrasion mechanism. Furthermore, the spinbots contributed to precise material removal, resulting in remarkable surface polishing (<i>R</i>\\n<sub>a</sub> ≈ 1.8 nm). This novel polishing system, which uses the collective behavior of multiple spinbots on a tabletop magnetic stirrer, is 1000-fold lighter than current state-of-the-art equipment aimed at achieving similar levels of fine finishing.\",\"PeriodicalId\":21841,\"journal\":{\"name\":\"Small Structures\",\"volume\":\"46 1\",\"pages\":\"\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2024-09-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Small Structures\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1002/sstr.202400245\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Small Structures","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1002/sstr.202400245","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
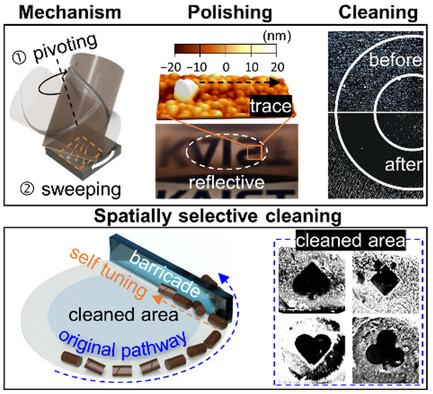
Spatially Selective Ultraprecision Polishing and Cleaning by Collective Behavior of Micro Spinbots
Untethered magnetic actuation is an attractive technique for controlling a batch of micrometer-sized soft robots. Recent advancements have enabled each robot to follow its path independently using a single magnetic device. However, applications of magnetic soft microrobots are mostly biased toward the biomedical field. In this study, thermoplastic polyurethane–Fe3O4 nanocomposite soft spinning microrobots, that is, spinbots that actuate on a tabletop magnetic stirrer, were utilized as innovative precision manufacturing tools for spatially selective precision polishing and cleaning. The pivot motion of the revolving spinbots, which involves repetitive sweeping during rotation cycles, is explored. This sweeping action physically removes nanometer-sized surface contaminants from the workpiece, achieving a cleaning efficiency of 99.6%. Multiple spinbots, up to 42 in total, simultaneously operated along their own orbital pathways on three vertically stacked wafers, thereby demonstrating an unprecedented cleaning method. In addition, the spinbots precisely removed materials from the workpiece using a three-body abrasion mechanism. Furthermore, the spinbots contributed to precise material removal, resulting in remarkable surface polishing (Ra ≈ 1.8 nm). This novel polishing system, which uses the collective behavior of multiple spinbots on a tabletop magnetic stirrer, is 1000-fold lighter than current state-of-the-art equipment aimed at achieving similar levels of fine finishing.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


