Shiyu Wu, Yang Zhou, Juan Wei, Zicheng Da, Wenquan Chen, Xiaoxia Shu, Tingting Luo, Yuping Duan, Runhuai Yang, Chengbiao Ding and Guangli Liu
{"title":"通过无油界面剪切实现无系磁性微机器人的藻酸盐/凝胶MA 微颗粒","authors":"Shiyu Wu, Yang Zhou, Juan Wei, Zicheng Da, Wenquan Chen, Xiaoxia Shu, Tingting Luo, Yuping Duan, Runhuai Yang, Chengbiao Ding and Guangli Liu","doi":"10.1039/D4BM00875H","DOIUrl":null,"url":null,"abstract":"<p >Microrobots hold broad application prospects in the field of precision medicine, such as intravenous drug injection, tumor resection, opening blood vessels and imaging during abdominal surgery. However, the rapid and controllable preparation of biocompatible hydrogel microparticles still poses challenges. This study proposes the one-step direct acquisition of biocompatible sodium alginate and gelatin methacrylate (GelMA) hydrogel microparticles using an oil-free aqueous solution, ensuring production with a controllable generation frequency. An adaptive interface shearing platform is established to fabricate alginate/GelMA microparticles using a mixture of the hydrogel, photoinitiator, and Fe<small><sub>3</sub></small>O<small><sub>4</sub></small> nanoparticles (NPs). By adjusting the static magnetic field intensity (<em>B</em><small><sub>s</sub></small>), vibration frequency, and flow rate (<em>Q</em>) of the dispersed phase, the size and morphology of the hydrogel microparticles can be controlled. These hydrogel microparticle robots exhibit magnetic responsiveness, demonstrating precise rotating and rolling movements under the influence of an externally rotating magnetic field (RMF). Moreover, hydrogel microparticle robots with a specific critical frequency (<em>C</em><small><sub>f</sub></small>) can be customized by adjusting the <em>B</em><small><sub>s</sub></small> and the concentration of Fe<small><sub>3</sub></small>O<small><sub>4</sub></small> NPs. The directional <em>in situ</em> untethered motion of the hydrogel microparticle robots can be successfully realized and accurately controlled in the climbing over obstacles and <em>in vitro</em> experiments of animals, respectively. This versatile and fully biodegradable microrobot has the potential to precisely control movement to bone tissue and the natural cavity of the human body, as well as drug delivery.</p>","PeriodicalId":65,"journal":{"name":"Biomaterials Science","volume":" 21","pages":" 5562-5572"},"PeriodicalIF":5.7000,"publicationDate":"2024-09-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Alginate/GelMA microparticles via oil-free interface shearing for untethered magnetic microbots†\",\"authors\":\"Shiyu Wu, Yang Zhou, Juan Wei, Zicheng Da, Wenquan Chen, Xiaoxia Shu, Tingting Luo, Yuping Duan, Runhuai Yang, Chengbiao Ding and Guangli Liu\",\"doi\":\"10.1039/D4BM00875H\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p >Microrobots hold broad application prospects in the field of precision medicine, such as intravenous drug injection, tumor resection, opening blood vessels and imaging during abdominal surgery. However, the rapid and controllable preparation of biocompatible hydrogel microparticles still poses challenges. This study proposes the one-step direct acquisition of biocompatible sodium alginate and gelatin methacrylate (GelMA) hydrogel microparticles using an oil-free aqueous solution, ensuring production with a controllable generation frequency. An adaptive interface shearing platform is established to fabricate alginate/GelMA microparticles using a mixture of the hydrogel, photoinitiator, and Fe<small><sub>3</sub></small>O<small><sub>4</sub></small> nanoparticles (NPs). By adjusting the static magnetic field intensity (<em>B</em><small><sub>s</sub></small>), vibration frequency, and flow rate (<em>Q</em>) of the dispersed phase, the size and morphology of the hydrogel microparticles can be controlled. These hydrogel microparticle robots exhibit magnetic responsiveness, demonstrating precise rotating and rolling movements under the influence of an externally rotating magnetic field (RMF). Moreover, hydrogel microparticle robots with a specific critical frequency (<em>C</em><small><sub>f</sub></small>) can be customized by adjusting the <em>B</em><small><sub>s</sub></small> and the concentration of Fe<small><sub>3</sub></small>O<small><sub>4</sub></small> NPs. The directional <em>in situ</em> untethered motion of the hydrogel microparticle robots can be successfully realized and accurately controlled in the climbing over obstacles and <em>in vitro</em> experiments of animals, respectively. This versatile and fully biodegradable microrobot has the potential to precisely control movement to bone tissue and the natural cavity of the human body, as well as drug delivery.</p>\",\"PeriodicalId\":65,\"journal\":{\"name\":\"Biomaterials Science\",\"volume\":\" 21\",\"pages\":\" 5562-5572\"},\"PeriodicalIF\":5.7000,\"publicationDate\":\"2024-09-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Biomaterials Science\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://pubs.rsc.org/en/content/articlelanding/2024/bm/d4bm00875h\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MATERIALS SCIENCE, BIOMATERIALS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomaterials Science","FirstCategoryId":"5","ListUrlMain":"https://pubs.rsc.org/en/content/articlelanding/2024/bm/d4bm00875h","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MATERIALS SCIENCE, BIOMATERIALS","Score":null,"Total":0}
Alginate/GelMA microparticles via oil-free interface shearing for untethered magnetic microbots†
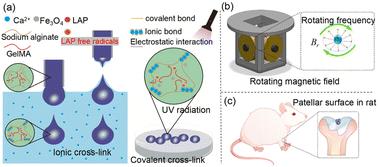
Microrobots hold broad application prospects in the field of precision medicine, such as intravenous drug injection, tumor resection, opening blood vessels and imaging during abdominal surgery. However, the rapid and controllable preparation of biocompatible hydrogel microparticles still poses challenges. This study proposes the one-step direct acquisition of biocompatible sodium alginate and gelatin methacrylate (GelMA) hydrogel microparticles using an oil-free aqueous solution, ensuring production with a controllable generation frequency. An adaptive interface shearing platform is established to fabricate alginate/GelMA microparticles using a mixture of the hydrogel, photoinitiator, and Fe3O4 nanoparticles (NPs). By adjusting the static magnetic field intensity (Bs), vibration frequency, and flow rate (Q) of the dispersed phase, the size and morphology of the hydrogel microparticles can be controlled. These hydrogel microparticle robots exhibit magnetic responsiveness, demonstrating precise rotating and rolling movements under the influence of an externally rotating magnetic field (RMF). Moreover, hydrogel microparticle robots with a specific critical frequency (Cf) can be customized by adjusting the Bs and the concentration of Fe3O4 NPs. The directional in situ untethered motion of the hydrogel microparticle robots can be successfully realized and accurately controlled in the climbing over obstacles and in vitro experiments of animals, respectively. This versatile and fully biodegradable microrobot has the potential to precisely control movement to bone tissue and the natural cavity of the human body, as well as drug delivery.
期刊介绍:
Biomaterials Science is an international high impact journal exploring the science of biomaterials and their translation towards clinical use. Its scope encompasses new concepts in biomaterials design, studies into the interaction of biomaterials with the body, and the use of materials to answer fundamental biological questions.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


