Edvard P.G. Bruun , Robin Oval , Wesam Al Asali , Orsolya Gáspár , Vittorio Paris , Sigrid Adriaenssens
{"title":"自动执行历史上最小化居中的砌体拱顶策略:合作机器人施工的应用","authors":"Edvard P.G. Bruun , Robin Oval , Wesam Al Asali , Orsolya Gáspár , Vittorio Paris , Sigrid Adriaenssens","doi":"10.1016/j.dibe.2024.100516","DOIUrl":null,"url":null,"abstract":"<div><p>This paper investigates the feasibility of adapting ancient historical construction techniques to cooperative robotic assembly methods to minimize centering requirements in masonry vaults. First, an overview of seven historical techniques is presented. Next, a classification framework is introduced to evaluate the automation potential of these methods, identifying the rib network as the most promising candidate. This is followed by two computational case studies on the cooperative robotic construction of planar masonry arches and multi-arch rib networks. These studies evaluated the impact of robotic reachability and support payload on the feasibility of centering-free construction. A conclusion based only on these simulation results is that high-payload fixed robots, in comparison to medium-payload mobile setups, allow for the construction of larger and more complex rib structures. This research is of relevance to architects and engineers interested in using a cooperative robotic fabrication framework to reduce centering in masonry vault construction.</p></div>","PeriodicalId":34137,"journal":{"name":"Developments in the Built Environment","volume":"20 ","pages":"Article 100516"},"PeriodicalIF":6.2000,"publicationDate":"2024-09-10","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2666165924001972/pdfft?md5=abfcf926673c85cea957a607ca4e3520&pid=1-s2.0-S2666165924001972-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Automating historical centering-minimizing masonry vaulting strategies: Applications to cooperative robotic construction\",\"authors\":\"Edvard P.G. Bruun , Robin Oval , Wesam Al Asali , Orsolya Gáspár , Vittorio Paris , Sigrid Adriaenssens\",\"doi\":\"10.1016/j.dibe.2024.100516\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>This paper investigates the feasibility of adapting ancient historical construction techniques to cooperative robotic assembly methods to minimize centering requirements in masonry vaults. First, an overview of seven historical techniques is presented. Next, a classification framework is introduced to evaluate the automation potential of these methods, identifying the rib network as the most promising candidate. This is followed by two computational case studies on the cooperative robotic construction of planar masonry arches and multi-arch rib networks. These studies evaluated the impact of robotic reachability and support payload on the feasibility of centering-free construction. A conclusion based only on these simulation results is that high-payload fixed robots, in comparison to medium-payload mobile setups, allow for the construction of larger and more complex rib structures. This research is of relevance to architects and engineers interested in using a cooperative robotic fabrication framework to reduce centering in masonry vault construction.</p></div>\",\"PeriodicalId\":34137,\"journal\":{\"name\":\"Developments in the Built Environment\",\"volume\":\"20 \",\"pages\":\"Article 100516\"},\"PeriodicalIF\":6.2000,\"publicationDate\":\"2024-09-10\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2666165924001972/pdfft?md5=abfcf926673c85cea957a607ca4e3520&pid=1-s2.0-S2666165924001972-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Developments in the Built Environment\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2666165924001972\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CONSTRUCTION & BUILDING TECHNOLOGY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Developments in the Built Environment","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2666165924001972","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CONSTRUCTION & BUILDING TECHNOLOGY","Score":null,"Total":0}
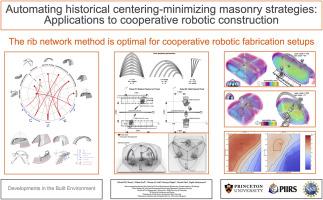
Automating historical centering-minimizing masonry vaulting strategies: Applications to cooperative robotic construction
This paper investigates the feasibility of adapting ancient historical construction techniques to cooperative robotic assembly methods to minimize centering requirements in masonry vaults. First, an overview of seven historical techniques is presented. Next, a classification framework is introduced to evaluate the automation potential of these methods, identifying the rib network as the most promising candidate. This is followed by two computational case studies on the cooperative robotic construction of planar masonry arches and multi-arch rib networks. These studies evaluated the impact of robotic reachability and support payload on the feasibility of centering-free construction. A conclusion based only on these simulation results is that high-payload fixed robots, in comparison to medium-payload mobile setups, allow for the construction of larger and more complex rib structures. This research is of relevance to architects and engineers interested in using a cooperative robotic fabrication framework to reduce centering in masonry vault construction.
期刊介绍:
Developments in the Built Environment (DIBE) is a recently established peer-reviewed gold open access journal, ensuring that all accepted articles are permanently and freely accessible. Focused on civil engineering and the built environment, DIBE publishes original papers and short communications. Encompassing topics such as construction materials and building sustainability, the journal adopts a holistic approach with the aim of benefiting the community.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


